LES SERVOS NUMERIQUES, DIT AUSSI " DIGITAUX " Les

LES SERVOS NUMERIQUES, DIT AUSSI " DIGITAUX "
Les différentes caractéristiques et le fonctionnement de ceux-ci
Ces dernières années, les servos ont considérablement évolué en taille, en puissance et en vitesse. Mais les servos
digitaux sont allés encore plus loin dépassant les très connus "coreless" qui représentaient jusqu'alors le haut de
gamme. Des avantages donc, mais quelques inconvénients mineurs apparaissent avec cette nouvelle technologie.
Nous allons tenté de passer en revue tout cela sans citer trop de termes complexes. Cet article permettra à nos
lecteurs de dissiper certains mythes.
1) Un servo numérique (dit aussi "digital") de marque Futaba, le S3152 à fort couple !
Quelques différences...
Un servo digital se différencie d'un servo analogique par le fait qu'il incorpore un microprocesseur qui analyse le
signal reçu du récepteur et contrôle le moteur du servo. Cette différence mise à part, les servos digitaux ne diffèrent
pas globalement des servos standards : ils contiennent le même moteur, les mêmes engrenages que les analogiques,
et ils disposent eux aussi d'un potentiomètre ("potar de recopie") qui indique la position de l'axe. Ce qui les
différencie principalement, c'est la façon de traiter l'information reçue du récepteur et le contrôle exercé sur la
tension électrique appliquée au moteur, ce qui permet de réduire la zone neutre - ou Deadband - augmentant ainsi
l'amplitude du mouvement et générant une grande stabilité du positionnement statique - Holding.
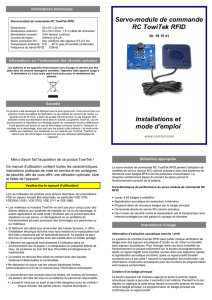
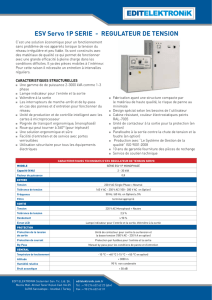
2) Circuit d'un servo standard (analogique)...
3) Idem mais celui d'un servo numérique : on peut voir en bas, le microprocesseur (composant noir).
Fonctionnement d'un servo standard
Quand un servo classique se trouve en position inactive après un mouvement, aucune tension électrique n'est
appliquée à son moteur; donc ce type de servo ne répond que quand il est soumis à un effort déterminé ou lorsque le
récepteur lui transmet un nouvel ordre de mouvement, c'est-à-dire le moment où il reçoit une tension électrique

pendant la durée de temps nécessaire au mouvement à effectuer. Cette tension électrique ou volta
g
e s'administre
sous forme d'impulsions électriques (on/off) à une fréquence de 50 par seconde. L'augmentation de l'amplitude des
impulsions agit sur le contrôle de la vitesse jusqu'au moment où le bras du servo se trouve dans la position
souhaitée. Durant la rotation, le potentiomètre indique au circuit électronique le moment où la position désirée est
obtenue ; les impulsions diminuent alors d'amplitude jusqu'à ce que plus aucune tension soit appliquée au moteur du
servo tout en conservant le bras dans sa nouvelle position. Dans ce type de commande, une impulsion forte et
instantanée suivie d'un temps d'arrêt ne provoque qu'une réaction du moteur limitée au temps de l'impulsion sans
aucune continuité de la rotation initiée comme pourrait le faire une mise sous tension continue. Ceci montre que les
petites impulsions données au moyen de la manette de commande ne produisent que de faibles effets. Ils peuvent se
révéler inefficaces et sont les causes de l'importante zone neutre qui caractérise les servos traditionnels. Pour en
avoir la démonstration, il suffit de bouger légèrement le stick de l'émetteur et d'observer la faible réponse du servo,
voire nulle.
Comparaison entre servo digital et analogique
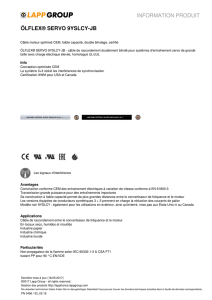
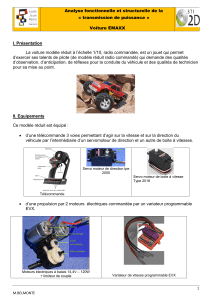
Le graphique 1 montre la différence dans le domaine de la zone neutre entre 2 servos aux caractéristiques
similaires : le digital S9450 et le classique S9402, tous deux produits par Futaba.
Dans le servo S9450, la zone neutre est beaucoup moins importante et la tension appliquée est plus forte et moins
longue que pour le servo analogique. L'interprétation à faire, quand il s'agit de modifier la position du bras du servo,
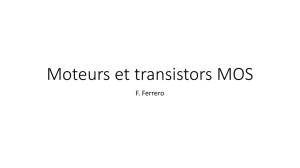
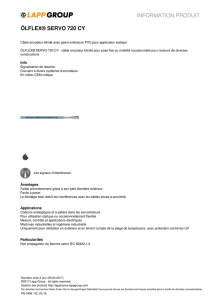
est que dans ce cas la réponse pour vaincre l'inertie dudit bras est plus rapide et plus puissante. Les diagrammes
comparatifs présentés dans le graphique 2 montrent deux cycles d'activité et de désactivation de la tension
d'alimentation du moteur correspondant à 2 servos,
un classique et un digital. Le diagramme 1 montre la situation au repos. Le diagramme 2 correspond à un petit
déplacement du moteur, c'est-à-dire une petite amplitude de l'impulsion donnée au stick. Le diagramme 3 montre
que pour un mouvement large du moteur dans le cas d'un servo standard, il faudra une plus grande amplitude de
l'impulsion.
4) Graphique 1 : comparaison des réponses entre un servo numérique ("digital" en anglais) et un servo standard,
c'est-à-dire analogique.
Avantages et inconvénients
Un servo digital contient un circuit microprocesseur qui reçoit le signal d'entrée et, après l'avoir enregistré, lui
applique des paramètres de présélection avant d'envoyer les ordres au moteur du servo. Ceci se traduit par une plus
grande amplitude - ou durée - des impulsions qui est contrôlée par le microprogramme chargé dans le
microprocesseur. La durée des impulsions s'ajuste à la demande en comparant leurs effets sur le servo et les
commandes de l'avion et en les optimisant au besoin. Le circuit électronique du servo digital envoie au moteur de
celui-ci des impulsions de plus grande fréquence que dans le cas d'un servo analogique ; alors que dans le second,
cette fréquence est de 50 impulsions par seconde, le servo digital monte jusqu'à 300 impulsions par seconde. Bien
que l'amplitude des impulsions soit proportionnellement réduite quand la fréquence augmente, compte tenu que cette

fréquence est plus
g
rande, le moteur réa
g
it mieux à l'ordre donné. Ainsi, le servo répond mieux aux ordres et plus
rapidement, et les augmentations (ou diminutions) de tension devant accélérer (ou freiner) le moteur sont transmises
presque instantanément. Ceci diminue la zone neutre du servo et lui procure une bonne rapidité de réponse, une
accélération rapide, un freinage progressif et plus efficace avec une meilleure stabilité dans le positionnement
statique. L'unique inconvénient des servos digitaux par rapport aux analogiques est leur plus grande consommation
d'énergie. Mais, même si le circuit du servo nécessite plus fréquemment une consommation d'énergie, il faut
cependant prendre en compte l'augmentation de puissance apportée par des réactions plus rapides et plus souples
des mouvements, d'où une consommation plus équilibrée et meilleure en définitive. Comme actuellement la capacité
des batteries a tendance à augmenter tout en voyant leur taille se réduire, une telle augmentation de consommation
permettant de meilleures prestations ne devient plus préoccupante si on opte pour l'installation de la batterie la
mieux appropriée permise par l'espace qui lui est dévolu et la limitation de poids liée au modèle. Et puis, il suffit de
vérifier avant chaque vol l'état de sa batterie et la recharger au besoin. De toute façon, les servos digitaux sont
l'avenir dans ce domaine.
5) Graphique n°2 : Vues des différences, durée des impulsions et fréquence.
Montage
La technologie des servos digitaux demande un montage précis. Étant donné que les circuits internes du servo
contrôlent en permanence la position du bras de ce servo, toute dureté ou défaut dans le système de transmission
empêchant la liberté de mouvement de l'ensemble se traduit par une augmentation de l'effort du servo. Les surfaces
de contrôle doivent être libres de tout frottement ou déformation au niveau de leurs axes. Bien que l'on ait pu
installer un système de charnières parfaitement aligné et sans frottements, il faut faire aussi très attention, lorsque
l'on a collé les éléments constitutifs des surfaces de contrôle, à ce qu'il ne reste pas des surplus de colle ou d'adhésif
qui empêcheraient le fonctionnement correct de l'ensemble. Il est indispensable de monter et de coller les systèmes
de charnière après application de la peinture, si celle-ci est nécessaire à la finition du modèle.

6) Vue sur la commande directe d'aileron d'un des planeurs testés sur ce site : la plus précise et sans frottement (pas
de gaine). On aperçoit le microservo analogique qui est bien trop faible (couple trop bas) et qui a tendance à
grésiller. S'il s'agissait d'un servo numérique ayant les mêmes caractéristiques, imaginez le bruit et la
consommation !! Le choix des servos est une étape primordiale, prenez votre temps et étudier bien les
caractéristiques de chacun (type analgoique ou numérique, tailles, poids, couple, vitesse...).
Les testeurs de servos
Il existe divers appareils dont le rôle est de vérifier le fonctionnement des servos sans qu'ils soient connectés au
récepteur. II s'agit de dispositifs permettant de vérifier leur comportement, leur vitesse et leur débattement. Le plus
sophistiqué est le HFP10 de Hitec. Ce programmateur permet le contrôle de plusieurs servos de différentes marques.
On peut lui assigner des fonctions comme vérifier la course maximale ou le sens de giration des servos, car il dispose
d'un microprocesseur qui change les fonctions suivantes du servo : amplitude de la zone neutre ou Deadband ; point
de sélection de Fail-safe ; fin de course et point mort ; vitesse du servo (on ne peut que la réduire) ; restauration des
valeurs initiales.
Il peut aussi analyser la valeur de la tension appliquée au moteur du servo et l'amplitude de l'impulsion qui arrive de
l'émetteur. Tous ces résultats sont affichés clairement sur un écran à cristaux liquides.
7) Le fameux testeur de Servos : "Hitec HFP-10". Il permet de tester et programmer les servos numériques ! Son prix
est assez élevé, dans les 100/150 euros.
8) Autre appareil proposé par le fabricant allemand Robbe : peu coûteux (32 euros), il est idéal pour tester l'usure
éventuelle du potentiomètre des servos ou les dommages du mécanisme. C'est de plus un accessoire pratique pour la
mise au point du neutre de servos lors de leur implantation dans les modèles.
1
/
4
100%