Technologie Trajectoire, vitesse, temps de parcours et schématisation

Technologie
R
Re
es
ss
so
ou
ur
rc
ce
es
s
Trajectoire, vitesse, temps de parcours et
schématisation
Nom : …………………
Prénom …………………
Classe : ………………
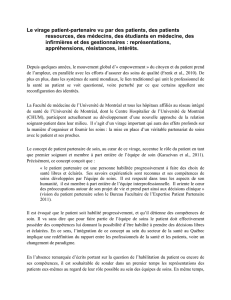
L’épreuve du golf
Epreuve du golf modélisée avec le logiciel SketchUp
Schématisation vue de dessus de l’épreuve du golf par un élève à l’échelle 1/10e
Calcul de la vitesse, du temps et de la distance du parcours du robot
- Pour estimer la vitesse du robot en ligne droite (mouvement rectiligne uniforme) en km/h,
on prendra la formule suivante :
- Pour estimer la vitesse du robot en virage (mouvement circulaire uniforme), on
prendra la formule suivante :
V= ω x R - ω est la vitesse angulaire, est une mesure de la vitesse de rotation.
Elle s'exprime dans le système international en radians par seconde (rad/s).
Elle reste de manière courante donnée en tours par minute (tr/min). Une
révolution complète est égale à 2π radians.
- R rayon de la roue en mètre
Dans la solution proposée par les élèves on
distingue trois trajectoires différentes :
- des trajectoires rectilignes (lignes droites)
- un virage à 90° en bloquant une roue
- un virage sur lui-même à 90° en
actionnant les deux roues dans les sens
opposés
Robot dans la case de départ
8 cm
50 tr/min

Travail d’un élève :
La première ligne droite est de 18 cm :
D = 10 cm soit 0,1 m
N = 50 tr/min
V= 3,6 x π x N x D
60
= 3,6 x π x 50 x 0,1
60
≃
0,94 km/h
= 940 m/h
= 940 m/s
60
= 0,26 m/s ou 26 cm/s
La vitesse du robot est 26 cm/s
Temps de parcours = distance
vitesse
T= 18 cm
26 cm/s
= 0,69 secondes Les roues du robot parcourent les 18 cm en 0,69 s
Le premier virage en bloquant une roue à 90° :
La vitesse angulaire ω : Une révolution complète de la roue est égale à 2π radians.
On sait que le moteur tourne à 50 tr/min donc la roue tourne à 50 tr/min.
Il faut transformer les tr/min en rad/s
ω = 50 tr/min
= 50 tr/s
60
= 50 x 2 π rad/s
60
≃
5,24 rad/s La vitesse angulaire est de 5,24 rad/s
Vitesse = ω x R
= 5,24 x 0,05
≃
0,26 m/s
= 26 cm/s La vitesse du robot est 26 cm/s
Pour la distance du parcours dans le virage à 90°, on sait que le robot mesure 16 cm de
large au niveau de roue, donc on divise le périmètre du cercle par quatre pour trouver la
distance parcourue :
T = d
V
= 8 x π cm
26 cm/s
T = 0,96 s
A 50 tr/min, la roue droite du robot parcourt le virage à 90° en
bloquant une roue en 0,96 s
On constate que dans les virages ou en ligne droite, si les
moteurs tournent à 50 tr/min, alors le robot se déplace à 26
cm/s.
On peut en déduire le tableau suivant :
Distance
ou angle
18 cm 90° 6 cm 90° 12 cm
Temps 0,69 s 0,96 s 0,23 s 0,96 s 0,46 s
Centre de
rotation
= périmètre du cercle / 4
= (diamètre x π) / 4
= (32 x π) / 4
= 8 x π cm

Ensuite le robot réalise un virage à 90° mais sur lui-même, c'est-à-dire que le robot utilise
ses deux roues pour tourner mais en sens inverse.
Pour la distance du parcours des roues dans le virage à 90°, on sait que le robot mesure
16 cm de large au niveau de roue, mais comme la rotation se fait au centre des deux
roues alors la distance entre le centre de rotation et la roue n’est plus que 8 cm.
Pour aller jusqu’à la balle à 26 cm/s le robot met 4,35 s
Pour connaître la distance parcourue par le robot,
nous sommes obligés de prendre le centre entre les
deux roues. Par exemple à la rotation sur lui-même
les roues du robot mettent 0,48 s pour faire le virage
mais en soit le robot est resté au même endroit.
Pour aller jusqu’à la balle, le robot parcourt avec cette trajectoire 76,12 cm
1
er
ligne
droite 1
er
virage
à 90° 2
ème
ligne
droite 2
ème
virage
à 90° 3
ème
ligne
droite Virage sur
lui même 3
ème
ligne
droite Total
Temps 0,69 s 0,96 s 0,23 s 0,96 s 0,46 s 0,48 s 0,57 s 4,35 s
1
er
ligne
droite 1
er
virage
à 90° 2
ème
ligne
droite 2
ème
virage
à 90° 3
ème
ligne
droite Virage sur
lui même 3
ème
ligne
droite Total
Distance 18 cm
4 x π cm
= 12,56 cm
6 cm
4 x π cm
= 12,56 cm
12 cm 0 cm 15 cm 76,12 cm
Distance
Centre de
rotation
T = d
V
= 4 x π cm
26 cm/s
T = 0,48 s
A 50 tr/min, les roues du robot
parcourent le virage à 90° sur lui-même
en 0,48 s
= périmètre du cercle / 4
= (diamètre x π) / 4
= (16 x π) / 4
= 4 x π cm
1
/
3
100%