PDF (Partie 2 sur 2 : chapitre 4, conclusion, annexe)


Chapitre 4
131
Sommaire du chapitre 4
1) Introduction et objectifs du chapitre ....................................................................................... 132
2) Stratégies et simulations préparatoires de l’onduleur monophasé à tolérance de panne
.....................................................................................................................................................133
2.1) Mode 1 naturel dit "crowbar" et la détection du défaut................................................... 133
2.2) Mode actif (disjoncteur) et la détection du défaut par flag du driver ............................... 134
2.3) Synthèse de la simulation du mode disjoncteur avec la confirmation ............................... 138
3) Mise en œuvre et dimensionnement du démonstrateur prototype ......................................... 140
3.1) Périmètre structurel et fonctionnel du boitier expérimental ........................................... 140
3.2) Dimensionnement de la cellule de conversion ................................................................. 141
3.2.1) Cahier des charges ................................................................................................... 141
3.2.2) Architecture de commande ...................................................................................... 143
3.3) 1ère caractérisation du prototype .................................................................................... 144
4) Caractérisation de la détection du défaut (superviseur) en utilisant les différents types de fusible
.....................................................................................................................................................145
4.1) Caractérisation sur le protistor BS88 32A ......................................................................... 145
4.2) Caractérisation sur le fusible CMS et fusible miniaturisation ............................................ 147
4.2.a) Protection par fusible miniature Littel-fuse™........................................................... 147
4.2.b) Protection par fusible CMS SCHURTER™................................................................... 152
4.3) Caractérisation sur le rupteur fusible PCB ........................................................................ 152
5) Vieillissement sur “temps long” de la Rsc du banc de test réel .................................................. 156
6) Conclusion du chapitre ............................................................................................................ 156
7) Références du chapitre ........................................................................................................... 158
Chapitre 4
Expérimentation d'une nouvelle structure de redondance à
connexion automatique

Chapitre 4
132
1) Introduction et objectifs du chapitre
Nous nous rappelons qu’une nouvelle structure de redondance, mêlant un dispositif d'isolement
symétrique, passif et un couplage-aiguillage automatique vers un bras de secours a été proposée au
chapitre 1. Cette structure comprend une fonction d’isolation (fusible ou rupteur-fusible présenté
dans le chapitre 2) et la connexion spontanée d'une redondance en série par les puces défaillantes
elles-mêmes de très faible résistance (présenté dans le chapitre 3). Cette structure est initialement
simulée et ensuite validée sous le logiciel PSIM™ [chapitre 1 2.3.2.b)] en onduleur.
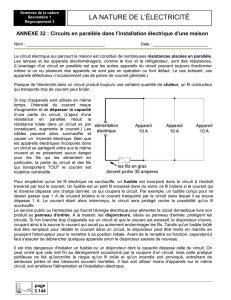
Dans ce chapitre, nous allons mettre en œuvre les concepts présentés à la Fig1, en utilisant des
dispositifs d’isolement et de connexion secours sur une maquette d’onduleur monocellulaire de
tension 350V/50A par différentes technologies d’isolement («dual-fuse», miniaturisés, CMS, PCB
passivé réalisé au laboratoire) et l’évaluation du dispositif de couplage-aiguillage à diodes d’un bras
de secours en redondance parallèle. Au niveau du diagnostic du défaut sur la cellule défaillante,
selon les modes de défaut, on applique un détecteur local et rapide de défaut couplé à un
superviseur numérique permettant d’ordonnancer les étapes d’isolement et de commutation de
mode «normal-secours » en un mode de reprise « sécurisé » à minimum de temps mort. Ces
résultats nous permettrons d’affiner les choix technologiques retenus pour des cahiers des charges
futurs et d’orienter la stratégie de gestion de défaut qu’ils soient internes ou externes à la topologie.
Fig.1 La structure de l’onduleur monophasé à tolérance de panne.

Chapitre 4
133
2) Stratégies et simulations préparatoires de l’onduleur monophasé à tolérance de panne
Conformément au contexte présenté dans le chapitre 1, on rappelle qu'un dispositif numérique de
supervision est intégré dans la carte de driver CONCEPT™. Cette protection rapprochée permettant
de diagnostiquer un défaut de court-circuit selon une méthode classique de détection de
désaturation des transistors. Pour cela, le driver envoie un courant continu de faible valeur à travers
le transistor fermé, générant ainsi une tension qui est comparée avec une référence prédéterminée
par la valeur de la résistance Rth. En cas de dépassement du seuil, signifiant la désaturation de l’IGBT,
le driver impose l’ouverture des deux IGBT pour couper le défaut. En même temps, de façon
générale, sur défaut, le driver génère un flag de défaut, ce flag est largement utilisé dans le plan de
simulation et aussi réalisé dans le démonstrateur de prototype, ce flag est reconnu par la carte de
commande qui doit démarrer le thyristor et le bras secours. Il faut noter qu’ici, cette protection des
composants est réalisée en quelques microsecondes.
Classification des modes de défaut et de gestion sécuritaire
2.1) Mode 1 naturel dit "crowbar" et la détection du défaut
Ce mode de défaillance est introduit déjà au chapitre 1 sur la structure de connexion secours (au
premier défaut). Lorsqu’une commande erronée ou un claquage touche un des deux IGBT sur le
bras principal, une désaturation et une destruction en cascade des deux puces apparaît. Les deux
transistors présentent alors une faible valeur de résistance résiduelle. Un chemin de court-circuit est
établit, à ce moment là, la source de tension Vbus est court-circuitée par cette cellule de commutation
défaillante jouant le rôle de crowbar. Les deux fusibles aux extrémités du bras principal vont jouer le
rôle de protection et d'isolation du bras défaillant.
Fig.2 Schéma de la partie génération du signal MLI, détection et confirmation du défaut, et la distribution de la
commande du bras principal et du bras secours en mode crowbar.

Chapitre 4
134
Au niveau de l’ordonnancement des séquences de la détection du défaut, on sollicite deux moyens
pour reconnaître le défaut d’un bras de commutation :
¾Sans confirmation :
Lorsque le défaut est actif et non répétitif, le défaut va être détecté sur la sortie de la cellule de
commutation par un opto-coupleur, ceci fait une image de la tension Vce_H2, qui est comparé avec la
commande H2 retardé de 500ns, le condensateur du filtre se charge et se décharge très rapidement
tant qu’il n’a pas atteint le seuil de déclenchement 0,8V du ‘comparateur’ digital, le détecteur de
défaut de commutation est "OFF". Une fois qu’un des deux IGBTs est défaillant, le détecteur passe en
ON, le défaut va être mis en mémoire pendant l’ouverture des deux fusibles. Les commandes des
deux IGBTs sont normalement appliquées au bras défaillant jusqu’à la destruction des deux puces du
boitier. Par ailleurs, pour assurer l’extinction du régime d’arc du fusible et le régime transitoire de
surtension du bus, un délai de 1ms (selon le type de fusible) va être introduit avant le démarrage du
bras secours en « recopiant » la commande du bras principal sur la commande du bras secours.
Enfin, le détecteur va être remis à zéro. La surveillance des commutations par le détecteur se fait
maintenant sur le bras secours.
¾Avec confirmation :
Un bloc de comptage est intégré dans le montage de la détection du défaut, lorsque le défaut est
détecté, il compte une fois, puis attend 500ms et lance un reset, si le défaut se produit N fois de
suite (N=3 appliqué dans la simulation et la maquette), le défaut définitif est confirmé, après une
temporisation de 1ms. On peut ensuite démarrer la commande du bras secours comme dans le cas
précédant.
2.2) Mode actif (disjoncteur) et la détection du défaut par flag du driver
Dans ce mode de défaut, au lieu de la détection du défaut sur la phase de commutation, nous
mettons en place des protections driver (senses collecteur branchés sur les collecteurs des IGBTs),
nous utilisons les flags défaut générés par la carte driver. En plus des remarques précédentes, tant
que le défaut flag est lancé, les commandes du bras défaillant vont être tout de suite bloquées à
zéro. Le thyristor auxiliaire va être allumé afin d'activer les deux fusibles et d'isoler le bras défaillant.
Et de même, après une milliseconde (selon le type de fusible), on démarre le bras secours en
aiguillant la commande du bras principal sur la commande du bras secours. Le fonctionnement
principal est présenté à la Fig.3
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
1
/
57
100%




![III - 1 - Structure de [2-NH2-5-Cl-C5H3NH]H2PO4](http://s1.studylibfr.com/store/data/001350928_1-6336ead36171de9b56ffcacd7d3acd1d-300x300.png)