Statique

Mécanique Physique (S2) 1ère partie – page 1
1ère partie
Equilibre Statique
Notes de cours de
Licence de Physique
de A. Colin de
Verdière
Introduction
Un objet est en équilibre statique lorsque dans un référentiel (défini par un autre objet) il est
au repos, immobile, cad sans vitesse relative par rapport à cet autre objet de référence1.
L’équilibre d’un objet matériel est évidement très important en Architecture et en techniques
industrielles: le bâtiment ou l’objet doit conserver son intégrité physique et il faut choisir la
nature et le dimensionnement du matériau pour éviter la casse. « La casse » est la signature
d’accélérations relatives entre différentes parties d’un objet. Un grimpeur sur une paroi
verticale des Alpes se pose aussi des problèmes d’équilibre (dont la solution desquels sa vie
dépend directement). A cette notion d’équilibre il faut ajouter la notion très importante de
stabilité: l’équilibre est il stable ? Si je perturbe l’équilibre, l’objet revient il à sa position
initiale ? Si oui on parlera d’un équilibre stable :
Voila deux positions d’équilibre d’un domino sur une
table. On sent bien que 2 est plus stable que 1 mais
comment le montrer ?
Si la résultante des forces est nulle sur un objet, les translations vont être interdites. Mais ici
on passe de la position 1 à 2 par une rotation et pour empêcher cette rotation il faut inventer
un nouveau concept le moment d’une force et rajouter que la somme des moments est nulle.
Pour calculer le moment d’une force, il va falloir introduire une nouvelle opération sur les
vecteurs, le produit vectoriel.
Si on s’intéresse à l’équilibre d’objets matériels rigides, il n’y a que deux types de
mouvements possibles les translations et les rotations. Si on suppose l’objet rigide, la distance
AB entre deux points quelconques est constante et il n’y a pas de déformation interne.
Translation : le vecteur AB garde la même
orientation dans l’espace.
Rotation : par exemple le point B tourne
autour de A et le vecteur AB tourne.
Le mouvement d’un corps est déterminé par des forces agissant sur un objet traduisant l’
action d’un corps sur un autre. On est habitué aux forces exercées lorsqu’il y a contact entre
deux corps mais il y a aussi le poids qui ne rentre pas dans cette catégorie : le poids est un
exemple de force qui agit à distance, c’est à dire entre la masse de la terre et la masse de
l’objet séparées d’une certaine distance.
1 Le référentiel associé au corps de référence doit être inertiel (sans accélération).
1
2
A
B

Mécanique Physique (S2) 1ère partie – page 2
La translation d’ensemble d’un corps est déterminée par les forces agissant sur l’objet. Mais
ce qui est important c’est la somme vectorielle des forces. On définit ainsi la résultante des
forces :
R = F1 + F2 + F3 + etc …
Une telle égalité vectorielle se traduit par autant d’égalités entre les composantes des vecteurs
selon un système d’axes choisis. Par exemple si les forces agissent dans un plan xy :
Rx = Σ Fix
Ry = Σ Fiy
l’intensité R de la résultante est le module du vecteur R:
R = (Rx2 + Ry2)1/2
et son orientation dans le plan xy est donnée par l’angle α :
tan α = Ry / Rx
Si les forces Fi agissent toutes en un même point, on parle de forces concourantes et le seul
mouvement possible est alors une translation. Si ce n’est pas le cas, l’objet peut tourner, et
une nouvelle notion doit être introduite pour voir ce qui cause une rotation.
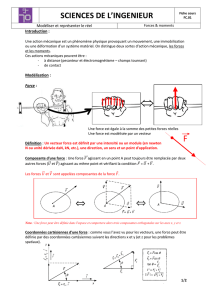
Le moment d’une force (torque en anglais)
Quelles sont les forces qui causent une rotation ?
Il suffit d’ouvrir une porte (de forme quelconque sur le
dessin) pour comprendre comment ça marche ou plutôt
quand ça ne marche pas pour commencer. La charnière
est en O et la poignée en A. Si j’exerce une force sur la
charnière de la porte (en O), rien ne se passe. Si
j’exerce une force en A dirigée vers la charnière (selon
OA) rien ne se passe. Pour faire tourner la porte autour
de son axe de rotation (passant par O), vous constaterez
que les circonstances les plus favorables sont que la
force F soit perpendiculaire à OA et que A le point
d’application de la force soit le plus loin possible de O
(c’est le cas des poignées de portes!). Le moment d’une
force capture cette expérience quotidienne. On va
d’abord définir son intensité comme :
τ = F l
où l, le bras de levier, est la distance du point O à la ligne d’action de la force, OH en vert sur
le dessin. Dans le triangle OAH rectangle en H, si θ est l’angle (OA, F):
l = OA sin θ
ainsi : τ = F r sin θ avec r = OA (distance)
y
x
F
H
l
A
O
Fn
(D)
θ

Mécanique Physique (S2) 1ère partie – page 3
Notez aussi que F sin θ = Fn est la projection de F sur la perpendiculaire à OA (en rouge), de
sorte qu’on a aussi :
τ = r Fn
Ceci définit le module du moment d’une force mais on en fait un vecteur en donnant aussi la
direction du moment. Le moment de F par rapport au point O est ainsi le vecteur τ défini par :
τ = OA x F
où le signe x signifie le produit vectoriel entre les deux vecteurs OA et F. (On le note aussi
parfois ^.) Ce n’est pas une simple multiplication entre deux nombres car les vecteurs OA et
F sont des vecteurs. Ce n’est pas un produit scalaire entre deux vecteurs puisque le résultat du
produit scalaire est un nombre (pas un vecteur). On définit la direction et le sens de τ comme :
• direction de τ : ⊥ plan formé par OA et F,
• sens : diverses règles « avec la main droite ».
Main droite selon τ avec paume ouverte vers
OA (vers le point d’application de la force) et
pouce vers F
ou encore :
Pouce dirigé selon τ lorsque les doigts de la
main droite sont courbés naturellement dans le
sens de la rotation produit par F autour de O.
Notes importantes :
1) le produit vectoriel est nul si OA // F.
2) Le produit vectoriel ne change pas si le point d’application A se déplace sur la droite
(D), support de la force F [en effet seule compte la distance de O à la droite (D),
appellé bras de levier]
Les composantes du produit vectoriel :
Supposons que F soit dans le plan xy et appliquée au
point A(x,y). Alors le moment τ est selon Oz. Pour
calculer cette composante de τ (les autres sont
nulles) à partir des composantes Fx et Fy connues on
se sert des définitions précédentes:
Le moment de Fx par rapport à O est – y Fx
L e moment de Fy par rapport à O est + x Fy
Fx fait tourner autour de O dans le sens trigonométrique < 0 et c’est pour ça qu’on a mis un -
alors que Fy fait tourner dans le sens > 0.
O
y
z
x
Fy
Fx
F
x
y
τ
F
A
O
(D)

Mécanique Physique (S2) 1ère partie – page 4
Si k désigne le vecteur unitaire selon Oz, pour avoir le moment total on fait la somme des
contributions au moment dues à Fx et Fy et:
τ = k (x Fy – y Fx)
Pour une force définie dans un espace 3D cad avec ses 3 composantes
!
!
!
"
#
$
$
$
%
&
z
y
x
F
F
F
, on calcule les
composantes du moment par rapport a O en appliquant le résultat précédent autour de chacun
des axes successivement. Le résultat peut se retrouver rapidement de la façon suivante:
x Fx
y Fy
1 τx = y Fz – z Fy
z Fz
2 τy = z Fx – x Fz
x Fx
3 τz = x Fy – y Fx
y Fy
x Fx
Notez que l’on passe d’une des composantes de τ à la suivante par permutation circulaire de
x,y,z et Fx, Fy, Fz.
Le cas de plusieurs forces concourantes
Si R est la résultante des forces Fi concourantes en
A, on peut calculer le moment de cette résultante par
rapport à un point O arbitraire:
τ = r x R = r x (F1 + F2 + F3 + …)
Mais le produit vectoriel est distributif par rapport à l’addition (pas très difficile à montrer à
partir de la définition en composantes) de sorte que :
τ = r x F1 + r x F2 + r x F3 + …
Le moment de la résultante est la somme des moments élémentaires τi de chacune des forces
Fi :
τ = Σ τi
Dans leur action sur un objet (induisant translation et rotation), les forces individuelles
concourantes peuvent donc être complètement remplacées par leur résultante. Si l’objet est
en équilibre, la résultante des forces est nulle et cela impliquera nécessairement que le
moment résultant est aussi nul. Mais attention ce résultat n’est valable que pour les forces
concourantes.
F1
F2
F3
A
O
r

Mécanique Physique (S2) 1ère partie – page 5
Couple de forces
Un couple est constitué de deux forces égales et opposées agissant sur des droites d’actions
parallèles.
1) R = F1 + F2 = 0
2) τ = τ1 + τ2 = r1 x F1 + r2 x F2 = (r1 - r2) x F1
r1 – r2 = BA (sur le dessin) et l la distance entre les deux droites d’action est le bras de levier
du couple de sorte que l’intensité τ = l F1. Notez qu’un couple est indépendant du point O par
rapport auquel on a calculé les moments de F1 et F2.
Composition de forces parallèles.
Supposons une barre soumise à un certain
nombre de forces F
i parallèles appliquées
en des points d’abcisse xi.
La composante selon Oy de la résultante est : R = Σ Fi
et le moment total par rapport à O (composante selon Oz) s’écrit :
τ = x1 F1 + x2 F2 + … = Σ xi Fi
Le moment total va être « reproduit » si la résultante R est appliquée en un point C d’abscisse
xC tel que :
R xC = Σ xi Fi
Ainsi l’abscisse xC est elle donnée par: xC = Σ xi Fi / Σ Fi
définit le point C sur la barre, le centre de forces parallèles, point d’application de R qui
permet de synthétiser l’effet des Fi sur la barre.
r2
r1
F2
F1
A
B
O
l
Tourne-vis
F2
F1
Fi
O
y
x
xi
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%