Un Algorithme robuste de Segmentation Vidéo pour des

Un Algorithme robuste
de Segmentation Vid´
eo pour des Applications Temps R´
eels
M. El Hassani, D. Rivasseau
Philips Semiconductors
Caen, France
S. Jehan-Besson, M. Revenu
Laboratoire GREYC
Caen, France
D. Tschumperl´
e, L. Brun
Laboratoire GREYC
Caen , France
M. Duranton
Recherche Philips
Eindhoven,Pays-Bas
R´
esum´
e
Dans ce papier, nous proposons un algorithme de segmen-
tation vid´
eo temps r´
eel conc¸u pour ˆ
etre stable temporel-
lement. Notre algorithme est bas´
e sur une segmentation
spatiale de l’image en r´
egions homog`
enes qui sont mises
`
a jour au fil de la s´
equence en utilisant des informations
de mouvement. En ce qui concerne la segmentation spa-
tiale, nous proposons une m´
ethode ascendante de segmen-
tation bas´
ee sur des fusions successives. Grˆ
ace `
a un ordre
de fusion sp´
ecifique et `
a un seuil adaptatif pour le pr´
edicat,
la m´
ethode donne de tr`
es bons r´
esultats sur des images
naturelles (mˆ
eme pour les r´
egions textur´
ees) avec peu de
param`
etres `
a r´
egler. De mani`
ere `
a am´
eliorer la consis-
tance temporelle de la segmentation pour une s´
equence
d’images, nous incorporons une information de mouve-
ment via un masque bas´
e sur la d´
etection des changements
d’intensit´
es entre deux images. Ce masque est conc¸u en uti-
lisant `
a la fois les diff´
erences d’intensit´
es entre image suc-
cessives et la segmentation de l’image pr´
ec´
edente. Notre
algorithme tourne en temps r´
eel sur un processeur TriMe-
dia pour des s´
equences de format CIF (Common Interme-
diate Format).
Mots clefs
Segmentation bas´
ee r´
egions, Fusion de r´
egions, Traitement
de S´
equences Vid´
eo, D´
etection du mouvement, Consis-
tance temporelle, Impl´
ementation mat´
erielle, Temps r´
eel.
1 Introduction
La segmentation de vid´
eos en r´
egions homog`
enes est cru-
ciale pour de nombreuses applications. Parmi elles, on peut
citer l’estimation de mouvement bas´
ee r´
egions et la conver-
sion du 2D au 3D o`
u la segmentation est utilis´
ee pour l’es-
timation de la profondeur. La tendance actuelle se dirige
´
egalement de plus en plus vers des traitement adapt´
es au
contenu de l’image (filtrage, rehaussement, compression
orient´
ee objet) et donc bas´
es sur une segmentation initiale
de la vid´
eo. Toutes ces applications n´
ecessitent l’obtention
d’une segmentation pr´
ecise et stable temporellement. Par
ailleurs, les applications multim´
edia vis´
ees n´
ecessitent un
algorithme de traitement des s´
equences en temps r´
eel.
Les m´
ethodes de segmentation spatiale peuvent ˆ
etre di-
vis´
ees en deux cat´
egories, les m´
ethodes bas´
ees r´
egions et
les m´
ethodes bas´
ees contour. Dans la premi`
ere cat´
egorie
[1], les transitions entre pixels sont calcul´
ees et les com-
posantes connexes peuvent alors ˆ
etre extraites. Le prin-
cipal inconv´
enient de ces approches est que le calcul du
gradient est parfois impr´
ecis et tr`
es sensible au bruit. De
plus il est alors difficile de tenir compte de propri´
et´
es sta-
tistiques des r´
egions consid´
er´
ees. La seconde cat´
egorie de
m´
ethodes (i.e. bas´
ees r´
egions) est donc plus souvent uti-
lis´
ee et c’est dans cette cat´
egorie que se situe notre algo-
rithme. Nous nous int´
eressons plus particuli`
erement ici aux
m´
ethodes ascendantes qui op`
erent par fusions successives
[2, 3, 4, 5]. Dans ces m´
ethodes, deux points importants sont
`
a consid´
erer : l’ordre de fusion et le crit`
ere de similarit´
e.
Lorsque l’on traite de segmentation vid´
eo, la dimension
temporelle doit ˆ
etre ajout´
ee et la segmentation en r´
egions
doit ˆ
etre stable temporellement. De nombreuses approches
ont ´
et´
e test´
ees. Quelques auteurs consid`
erent le temps
comme une dimension suppl´
ementaire et la vid´
eo devient
alors un volume 3D [6]. D’autres approches utilisent une
information de mouvement comme la d´
etection des chan-
gements d’intensit´
es ou les vecteurs mouvement [7, 8].
Nous n’abordons pas ici le suivi d’objet qui consiste `
a
suivre un objet au cours du temps (voir par exemple les
travaux [9]).
Dans ce papier, nous proposons une segmentation spatiale
bas´
ee sur la fusion de r´
egions. Cette fusion est faite dans
un ordre sp´
ecifique qui est fonction de la diff´
erence d’in-
tensit´
e entre les pixels voisins. Par ailleurs, un crit`
ere de si-
milarit´
e bas´
e sur les diff´
erences de moyennes entre r´
egions
est utilis´
e pour la fusion. La fusion est arrˆ
et´
ee `
a l’aide
d’un seuil adaptatif justifi´
e par une mod´
elisation statistique
de l’image. Nous nous sommes bas´
es sur les travaux de
[2] en proposant une mod´
elisation statistique de l’image
qui conduit `
a un seuil plus appropri´
e pour la segmenta-
tion en temps r´
eel. Notre m´
ethode donne une segmentation
tr`
es satisfaisante pour des images naturelles (mˆ
eme pour
des images textur´
ees) avec peu de param`
etres `
a r´
egler. De
mani`
ere `
a am´
eliorer la consistance temporelle, nous propo-
sons d’ajouter l’information de mouvement. Comme l’esti-
mation du mouvement entre deux images est une op´
eration
coˆ
uteuse, nous avons choisi de combiner un masque de
d´
etection des changements d’illumination avec les infor-
mations r´
egions contenues dans la segmentation spatiale de
l’image pr´
ec´
edente. En faisant des comparaisons au niveau
pixellique et au niveau r´
egion, on obtient un algorithme tr`
es
1

efficace pour un faible coˆ
ut calcul.
Notre algorithme tourne en temps r´
eel sur des s´
equences
de format CIF sur le processeur TriMedia. De plus les
r´
esultats exp´
erimentaux montrent l’applicabilit´
e de notre
m´
ethode sur des s´
equences d’image que ce soit en terme
de qualit´
e de la segmentation obtenue ou de stabilit´
e tem-
porelle.
Ce papier est organis´
e de la mani`
ere suivante. L’algo-
rithme de segmentation spatiale est d´
etaill´
ee dans la sec-
tion 2. L’introduction d’informations temporelles pour
am´
eliorer la consistance est d´
etaill´
ee en section 3. Enfin
dans la section 4, nous d´
eveloppons l’implantation de notre
algorithme. Les r´
esultats exp´
erimentaux sont finalement
donn´
es section 5.
2 Segmentation spatiale
Consid´
erons une image Ide largeur Wet de hauteur H,
D={1....W } × {1....H}est le domaine de l’image.
I(p, n)l’intensit´
e du pixel de position p= (x, y)Tdans
l’image n.
La segmentation d’une image en r´
egions consiste `
a trou-
ver une partition pertinente de l’image en mr´
egions
{S1, S2, .., Sm}. L’algorithme propos´
e part du niveau
pixellique et proc`
ede par fusions successives pour aboutir
`
a la segmentation finale (m´
ethode ascendante). Un ordre
sp´
ecifique de fusion est utilis´
e ainsi qu’un seuil adaptatif
pour stopper les fusions. Ces deux ´
etapes sont d´
etaill´
ees
ci-apr`
es et nous donnerons ensuite l’algorithme complet de
segmentation.
2.1 Ordre de fusion
L’ordre de fusion est bas´
e sur les poids des transitions
comme dans [2, 10]. L’id´
ee est de fusionner d’abord ce qui
est similaire avant de fusionner ce qui est diff´
erent. Une
transition eest un couple de pixels (p, p′)en 4-connexit´
e.
La similarit´
e entre pixels est mesur´
ee en calculant la dis-
tance entre les intensit´
es des deux pixels. Pour des images
couleur, la similarit´
e est calcul´
ee de la mani`
ere suivante :
w(p, p′) = sX
I∈{Y,U,V }
(I(p, n)−I(p′, n))2.(1)
Nous avons choisi l’espace couleur Y UV qui est le format
couleur utilis´
e pour le traitement des vid´
eos ce qui nous
´
evite ainsi une conversion. De plus, nous avons trouv´
e que
l’espace couleur Y UV procure une partition de l’image
qui est, subjectivement, de qualit´
e meilleure que celle ob-
tenue avec l’espace RGB. L’espace L∗a∗b∗donne des
r´
esultats l´
eg`
erement meilleurs que l’espace Y UV , mais au
prix d’une impl´
ementation coˆ
uteuse [11].
Les transitions sont ensuite tri´
ees dans l’ordre croissant de
leurs poids wet les couples de pixels correspondant sont
trait´
es dans cet ordre pour la fusion. En ce qui concerne
l’impl´
ementation, l’image est seulement parcourue deux
fois pour ce tri. Le premier parcours permet de calculer
le nombre de transitions de mˆ
eme poids, nombre qui est
stock´
e dans une table. Cette table est ensuite utilis´
ee pour
allouer la m´
emoire pour ces transitions. Le second permet
de stocker chaque transition dans la partie de la m´
emoire
correspondante.
2.2 Crit`
ere de fusion
Etant donn´
ees deux r´
egions S1et S2, nous voulons savoir si
ces deux r´
egions doivent ˆ
etre fusionn´
ees. En cons´
equence,
un crit`
ere de similarit´
e entre r´
egions doit ˆ
etre choisi et
´
evalu´
e. En comparant la valeur de ce crit`
ere `
a un seuil, les
r´
egions seront fusionn´
ees ou non. Le choix du seuil est sou-
vent difficile. Dans ce papier, nous utilisons un seuil adap-
tatif qui d´
epend de la taille de la r´
egion consid´
er´
ee. L’uti-
lisation d’un tel seuil est justifi´
ee par le biais d’in´
egalit´
es
statistiques comme dans [2]. Nous proposons ici une in-
terpr´
etation statistique plus simple de l’image qui nous
conduit `
a un crit`
ere plus adapt´
e pour une impl´
ementation
temps r´
eel. Nous pr´
esentons d’abord ici le pr´
edicat de fu-
sion utilis´
e, puis sa d´
emonstration.
Pr´
edicat de fusion. La moyenne des intensit´
es de la
r´
egion Siest calcul´
e de la mani`
ere suivante :
Si=1
|Si|
k=|Si|
X
k=1
Ii(pk)
o`
uIi(pk)est l’intensit´
e du k`eme pixel de la r´
egion Si.
Le pr´
edicat de fusion est alors :
P(S1, S2) = (vrai si (S1−S2)2≤Qg2(1
|S1|+1
|S2|)
faux sinon (2)
avec gle niveau maximum de I(g= 255 pour les
images de composantes en pr´
ecision 8bits). LA nota-
tion |Si|repr´
esente la taille de la r´
egion Si. Le param`
etre
Qpermet de r´
egler la finesse de la segmentation. Dans
les exp´
eriences, nous choisissons Q= 2 qui donne de
bons r´
esultats pour le format vid´
eo CIF (taille des images
352 ×288).
Justification statistique du pr´
edicat. Classiquement,
l’image Iest consid´
er´
ee comme l’observation d’une
image parfaite I∗et les pixels sont alors des observa-
tions d’un vecteur de variables al´
eatoires (v.a) not´
eX=
(X1, .., Xn)T. Le pr´
edicat de fusion est bas´
e sur l’in´
egalit´
e
de McDiarmid [12] donn´
ee ci-apr`
es :
Theorem 2.1 (L’in´
egalit´
e de McDiarmid) Soit X=
(X1, X2, ..., Xn)une famille de nv.a. ind´
ependantes avec
Xkprenant ses valeurs dans un ensemble Akpour chaque
k. Supposons que la valeur r´
eelle de la fonction fdefinie
sur QkAksatisfasse |f(x)−f(x′)| ≤ cksi les vecteurs
xet x′diff`
erent seulement sur leurs k`eme coordonn´
ee. Soit
E(f(X)) l’esp´
erance de f(X)alors quelque soit τ≥0,
P r(|f(X)−E(f(X))|> τ)≤2 exp −2τ2/X
k
c2
k!(3)

Nous nous int´
eressons ici `
a deux r´
egions adjacentes S1et
S2. Dans ce cas, nous consid´
erons le vecteur de variables
al´
eatoires suivant :
(X1, ..., Xn) = I∗
1(p1), ..., I∗
1(p|S1|), I∗
2(p1), ..., I∗
2(p|S2|)
Avec Ii(pj)l’intensit´
e du j`eme pixel de Sicorrespondant `
a
l’observation de la variable al´
eatoire I∗
i(pj). Dans ce cas, la
taille du vecteur de variables al´
eatoires est n=|S1|+|S2|.
De mani`
ere `
a appliquer le th´
eor`
eme 2.1, nous choisissons
comme fonction f(x) = S1−S2. Pour cette fonction,
nous trouvons que Pkc2
k=g21
|S1|+1
|S2|.
Par inversion du th´
eor`
eme, nous avons avec une probabilit´
e
d’au moins 1−δ(0< δ ≤1) :
|(S1−S2)−ES1−S2| ≤ gsQ1
|S1|+1
|S2|
avec Q=1
2∗ln(2
δ), et E(S)l’esp´
erance de S. Si S1et
S2appartiennent `
a la mˆ
eme r´
egion dans I∗, l’esp´
erance
ES1−S2sera nulle et le pr´
edicat suit.
2.3 Algorithme de segmentation
L’algorithme 1 donne le traitement complet pour la
segmentation spatiale. L’algorithme de fusion utilise la
structure de donn´
ees “UNION-FIND”[13]. La fonction
UNION fusionne deux r´
egions en une seule r´
egion et
la fonction F IND permet d’identifier la r´
egion d’appar-
tenance d’un pixel.
Algorithm 1 La segmentation spatiale
Calcul des poids des transitions et de l’histogramme
correspondant
Tri par ordre croissant des transitions en fonction de la
valeur de leur poids w.
for i:= 1 to 2|I|do
Lecture de la i`eme transition : (p1, p2);
S1=F IN D(p1);
S2=F IN D(p2);
if P(S1, S2) = T rue then
UNION(S1, S2)
end if
end for
3 Am´
elioration de la consistance
temporelle
La qualit´
e d’une segmentation vid´
eo d´
epend non seulement
de la bonne s´
eparation entre les r´
egions significatives dans
l’image, mais aussi de la consistance temporelle de cette
s´
eparation. En effet, si dans deux images successives, une
mˆ
eme r´
egion est segment´
ee diff´
eremment, ce qui peut ˆ
etre
dˆ
u au bruit, ou `
a des situations particuli`
eres comme l’oc-
clusion, la deocclusion, alors les r´
esultats de la segmenta-
tion seront difficilement exploitables dans des applications
comme l’am´
elioration de l’image ou la conversion 2D/3D.
Quelques auteurs [8] utilisent les vecteurs de mouvements
pour am´
eliorer la consistance temporelle de la segmenta-
tion vid´
eo. Or l’estimation de mouvement est tr`
es coˆ
uteuse
en temps de calcul et n’est pas toujours fiable. Dans ce
papier nous utilisons un masque de changement d’inten-
sit´
es (CDM) combin´
e avec la segmentation spatiale pour
am´
eliorer la coh´
erence temporelle de la segmentation.
Le CDM est calcul´
e en utilisant la diff´
erence d’in-
tensit´
es entre les images et la segmentation de l’image
pr´
ec´
edente. Premi`
erement, on d´
etecte les variations d’in-
tensit´
e des pixels en utilisant la diff´
erence entre deux
images cons´
ecutives. Ensuite, nous exploitons la seg-
mentation de l’image pr´
ec´
edente afin de classifier les
pixels au niveau r´
egion. Si on consid`
ere l’image cou-
rante I(:, n)et l’image pr´
ec´
edente I(:, n −1), La
diff´
erence entre les images F D est donn´
ee par F D(p) =
|I(p, n)−I(p, n −1)|. Cette diff´
erence est classiquement
seuill´
ee pour distinguer les variations d’intensit´
e des pixels
dues aux objets en mouvement de celles dues au bruit.
Soit LLe r´
esultat de seuillage de l’image F D. Un pixel
p, avec L(p) = 1 est un pixel classifi´
ee comme chan-
geant, c’est `
a dire que pour ce pixel, la variation d’inten-
sit´
e entre deux images est sup´
erieure `
a un seuil. Ensuite on
utilise la segmentation pr´
ec´
edente pour convertir le CDM
du niveau pixel au niveau r´
egion, ce qui est plus fiable.
Pour chaque r´
egion dans la segmentation pr´
ec´
edente Si,
on calcule τ(Si), qui repr´
esente le ratio des pixels chan-
geants dans la r´
egion Si. Nous avons τ(Si) = Ni,changeant
|Si|,
ou Ni,changeant est le nombre de pixels changeant dans
la r´
egion. Les pixels sont classifi´
es par la suite en trois
cat´
egories :
CDM(p) =
0si (τ(Si)≤tr2).
1si (τ(Si)> tr2)et (L(p) = 1).
2si (τ(Si)> tr2)et (L(p) = 0).
(4)
o`
utr2est une constante positive. Plus cette constante est
importante, plus la segmentation sera stable mais on risque
alors de ne pas segmenter correctement les zones en mou-
vement. La valeur du seuil tr2est donc choisie faible afin
de ne pas manquer une r´
egion en mouvement. Dans nos
exp´
eriences, nous avons pris tr2= 0.01 (i.e. on consid`
ere
qu’une r´
egion a boug´
e, si elle contient au moins 1% de
pixels changeant, sinon elle est consid´
er´
ee comme sta-
tique).
Les pixels appartenant `
a une r´
egion statique sont ´
etiquet´
es
en utilisant CDM(p) = 0. Les deux autres ´
etiquettes, 1,2,
concernent les pixels dans les r´
egions qui ont boug´
e. Se-
lon la valeur de la diff´
erence entre images, appel´
ee ici F D,
Le pixel est qualifi´
e comme ´
etant changeant CDM(p) =
1ou non changeant CDM(p) = 2. Une telle classi-
fication est alors utilis´
ee pour segmenter l’image cou-
rante. Premi`
erement, Les r´
egions statiques sont gard´
ees
telles qu’elles ´
etaient segment´
es dans l’image pr´
ec´
edente.
Deuxi`
emement, on applique un algorithme d’extraction de
composantes connexes (CCL)[14] afin d’extraire les com-

posantes connexes des pixels ayant CDM(p) = 2. Cette
deuxi`
eme ´
etape construit des germes `
a partir de la seg-
mentation pr´
ec´
edente. Ces germes lient la segmentation
pr´
ec´
edente `
a la segmentation courante tout en am´
eliorant
la consistance temporelle. Troisi`
emement on applique la
segmentation spatiale algorithme.1 seulement sur les tran-
sitions (p, p′)qui connectent les pixels changeant (i.e.
CDM(p) = 1,CDM(p′) = 1), et ceux connectant
les pixels changeant avec les germes construits dans la
deuxi`
eme ´
etape (i.e. (CDM(p) = 1 et CDM(p′) = 2)
ou (CDM(p) = 2 et CDM(p′) = 1)).
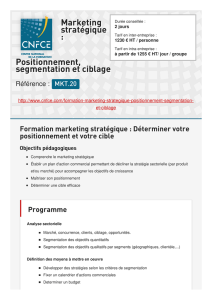
Nous montrons un exemple de segmentation avec et
sans consistance temporelle dans Fig.1(d) et 1(c). Dans
Fig.1(b), nous repr´
esentons les diff´
erentes ´
etiquettes (i.e.
valeurs du CDM) avec des intensit´
es diff´
erentes (noir pour
CDM(p) = 0, rouge pour CDM(p) = 2 et blanc pour
CDM(p) = 1). Dans la section 5, nous proposons le calcul
(a) (b)
(c) (d)
FIG. 1 – (a) Segmentation de l’image n−1. (b) CDM cal-
cul´
e en utilisant la diff´
erence d’illumination entre l’image
n−1et l’image net la segmentation de l’image n. (c)
Segmentation de l’image nsans utiliser le CDM. (d) Seg-
mentation de l’image navec l’utilisation du CDM.
d’une mesure objective de la consistance temporelle. Les
r´
esultats montrent une vraie am´
elioration de la consistance
temporelle pour diff´
erentes s´
equences. En plus de cela, La
mani`
ere dont nous exploitons le CDM r´
eduit aussi les cal-
culs de l’algorithme. Cette r´
eduction des calculs est due au
fait que les transitions dans les r´
egions statiques ne sont
pas retrait´
ees, et que les transitions connectant les pixels
non changeant sont trait´
ees seulement par un algorithme
CCL
4 Impl´
ementation de l’algorithme
La figure 2 montre l’algorithme complet de la segmen-
tation vid´
eo. A part la boucle de fusion de la segmenta-
FIG. 2 – L’algorithme complet de la segmentation vid´
eo
tion spatiale, les autres fonctions de l’algorithme acc`
edent
aux donn´
ees dans un ordre connu (par exemple de gauche
`
a droite, de haut en bas). Cette r´
egularit´
e d’acc`
es aux
donn´
ees, limite le nombre de d´
efauts de cache puisque
La m´
emoire cache exploite la localit´
e spatiale et tempo-
relle des donn´
ees. Contrairement `
a cela, dans la boucle
de fusion, la structure de donn´
ees UNION-FIND est non
pr´
edictible et cause donc un nombre de d´
efauts cache im-
portant ce qui ralentit l’ex´
ecution de l’algorithme. Afin de
limiter le nombre de d´
efauts de cache, nous avons inves-
tigu´
e deux optimisations qui sont ind´
ependantes du type
de la m´
emoire cache.
La premi`
ere optimisation concerne la fac¸on dont on
´
etiquette les r´
egions pendant le processus de segmentation.
Il y a deux m´
ethodes pour g´
erer cela. Dans la premi`
ere, on
g´
en`
ere des nouveaux labels qui repr´
esentent les r´
egions et
donc optimiser l’utilisation des labels. Mais cette premi`
ere
m´
ethode doit utiliser un autre tableau ou sera stock´
e la cor-
respondance entre les labels g´
en´
er´
es et les pixels de notre
image. Dans cette premi`
ere m´
ethode nous acc´
edons `
a deux
structures de donn´
ees qui ont des organisations diff´
erentes.
Dans la deuxi`
eme m´
ethode, chaque pixel dans l’image peut
ˆ
etre le repr´
esentant d’une r´
egion (on peut choisir celui
dont l’adresse est la minimale). Nous avons v´
erifi´
e que
la deuxi`
eme m´
ethode cause moins de d´
efauts de cache.
Donc les donn´
ees sont stock´
ees dans un tableau Ade taille
|I|, chaque ´
el´
ement A(p)stocke la moyenne des couleurs
(Y , U, V )et le cardinal |S|. La deuxi`
eme optimisation
Concerne la structure de donn´
ees UNION-FIND. Elle est
encod´
ee s´
epar´
ement du tableau Acit´
e pr´
ec´
edemment grˆ
ace
`
a un tableau Fo`
uF(p)contient le p`
ere de p. La solution
alternative consisterait `
a stocker les deux structures dans
une seule, mais cela impliquerait le stockage de donn´
ees
inutiles dans le cache lors des op´
erations FIND.
Nous avons exp´
eriment´
e ces optimisations sur le proces-
seur TriMedia[15]. La m´
emoire cache de ce processeur
est de taille 128 KOctet, 4-associative, avec des blocs de
taille 128 Octet. L’algorithme de remplacement utilis´
e est
LRU. Nous avons une r´
eduction moyenne de 3Mcycles
du temps d’ex´
ecution de l’algorithme. Ces optimisations
sont utiles pour plusieurs segmentations qui utilisent la

structure de donn´
ees UNION-FIND.
Il y a une quantit´
e importante de parall´
elisme de donn´
ees
(DLP) dans notre algorithme (calcul des valeurs de transi-
tions, calcul du masque de changement entre images). Ceci
permet d’acc´
el´
erer l’algorithme en traitant des donn´
ees
en parall`
ele si l’architecture cible dispose des ressources
suffisantes. Le coeur du TriMedia est une architecture
VLIW disposant de plusieurs unit´
es fonctionnelles. Ces
unit´
es fonctionnelles peuvent traiter quatre octets en pa-
rall`
ele (mode SIMD). Le parall´
elisme d’instructions (ILP)
est extrait par le compilateur, tandis que le parall´
elisme de
donn´
ees peut ˆ
etre exploit´
e en utilisant des intrins`
eques et
le d´
eroulage de boucle. Nous nous sommes servis de ces
optimisations pour exploiter le (DLP) qu’offre notre algo-
rithme.
5 Les r´
esultats exp´
erimentaux
Dans cette section, nous pr´
esentons des r´
esultats
exp´
erimentaux de notre algorithme port´
e sur le pro-
cesseur TriMedia et ´
evalu´
e pour des s´
equences CIF
(images de taille 352*288). Le tableau 3 montre les
r´
esultats suivants :
1. Mesure de la consistance temporelle :
Nous avons utilis´
e ici une mesure classique.
Consid´
erons la segmentation de l’image pr´
ec´
edente
SEG(n−1) et la segmentation de l’image courante
SEG(n), nous trouvons la correspondance entre les
r´
egions dans SEG(n−1) et celles dans SEG(n).
Deux r´
egions (Si,n−1∈SEG(n−1) et Sj,n ∈
SEG(n)correspondent si elles ont un maximum
de recouvrement Overlap(i, j) = |Si,n−1∩Sj,n|.
Nous additionnons le nombre de pixels des zones
de recouvrement des r´
egions qui correspondent dans
toute l’image. La consistance temporelle est alors le
pourcentage de ce nombre par rapport `
a la taille de
l’image.
2. Temps d’execution :
Nous donnons le nombre de Mega cycles que prend
l’ex´
ecution de l’algorithme sur TriMedia. Comme
nous l’avons d´
ej`
a not´
e, l’utilisation du CDM r´
eduit
les calculs de l’algorithme. Le cas critique de l’algo-
rithme (temps de calcul le plus long pour une image)
correspond `
a l’ex´
ecution de la segmentation spatiale
sans CDM. Ce cas critique correspond par exemple
au traitement de la premi`
ere image de la s´
equence o`
u
l’information CDM n’est pas disponible, ou au trai-
tement d’une image apr`
es un changement de sc`
ene
o`
u l’information donn´
ee par le CDM ne r´
eduit pas
les calculs. Pour cette raison, nous donnons ici les
temps d’ex´
ecutions correspondant `
a ce cas critique.
Si on int`
egre l’algorithme de consistante temporelle,
le temps de calcul sera r´
eduit.
Lorsqu’on utilise le CDM, la mesure de consistance tem-
porelle est ´
elev´
ee. Visuellement cela se traduit par une seg-
mentation en r´
egions plus stable d’une image `
a l’autre. La
FIG. 3 – Les mesures exp´
erimentales de notre algorithme
segmentation reste cependant pr´
ecise comme le montre la
figure 4. A titre de comparaison, nous montrons aussi les
r´
esultats de segmentation obtenus avec l’algorithme JSEG
[7] qui est maintenant une r´
ef´
erence dans le domaine de
la segmentation. L’algorithme JSEG proc`
ede d’abord `
a
une quantification suivie d’une mesure de similarit´
e`
a plu-
sieurs ´
echelles, ce qui augmente consid´
eralement sa com-
plexit´
e et le nombre de param`
etres `
a r´
egler. Son approche
multi´
echelle explique les bons r´
esultats obtenus dans les
zones textur´
ees (figure.4(b)). Par contre, notre algorithme
donne de meilleurs r´
esultats dans les zones homog`
enes (fi-
gure.4(e)) et il extrait ´
egalement mieux les petites r´
egions.
Ce dernier point est important particuli`
erement lorsque
l’application vis´
ee est l’am´
elioration d’image.
Au niveau de l’´
execution de notre algorithme, le proces-
seur TriMedia utilis´
e dans notre exp´
erimentation peut fonc-
tionner avec une fr´
equence ´
egale `
a450 MHz. Une telle
fr´
equence nous permet de traiter plus de 25 images par se-
conde, ce qui est suffisant pour une ex´
ecution temps r´
eel.
6 Conclusion
La conception d’algorithmes pour le traitement des vid´
eos
n´
ecessite une ex´
ecution de ceux-ci en temps r´
eel. Pour cette
raison, nous avons choisi d’utiliser des m´
ethodes ayant
un temps de calcul raisonnable. Nous avons propos´
e une
m´
ethode de segmentation vid´
eo consistante temporelle-
ment. Notre m´
ethode donne des r´
esultats pr´
ecis, et d’une
grande consistance temporelle. Elle est bas´
ee sur une seg-
mentation spatiale statistique et un masque de d´
etection
des changements d’illumination. Elle fonctionne en temps
r´
eel sur un seul processeur. Des r´
esultats exp´
erimentaux
d´
emontrent l’applicabilit´
e de cette m´
ethode. Nos re-
cherches futures concernent la mise en oeuvre de l’al-
gorithme en temps r´
eel sur des s´
equences HD (Haute
D´
efinition), et l’exploitation des r´
esultats de segmentation
pour l’am´
elioration d’image.
Remerciements
Les auteurs remercient P. Meuwissen, O.P. Gangwal et Z.
Chamski pour leurs suggestions constructives.
 6
6
1
/
6
100%