Dynamique du solide

C:\New Data\Lycée\Cours mécanique\2ème année\Cours dynamique BTS.doc L.D. 14/03/2005 PAGE 1/7
DYNAMIQUE DU SOLIDE
1. INTRODUCTION
La dynamique est la partie de la mécanique qui étudie les relations entre les déplacements des solides et
leurs causes, c’est à dire les actions mécaniques extérieures qui agissent sur eux.
2. PRINCIPE FONDAMENTAL DE LA DYNAMIQUE
Dans un repère galiléen, un système matériel (S) soumis à des Actions Mécaniques extérieures quelconques
modélisables par :
{}
τSS
SS
SS
AA
/
/
/
()
()
=≠
≠
r
r
rr
R
M
0
0
a un mouvement tel que:
r
r
r
rr
r
R
M
()
() ( )
/*
()
*()
/*
()
SS i
S
iG
SS i i i
S
mMM
AAM m M
==
=∧
∑
∑
γγ
γ
où:
mi représente la masse du volume
élémentaire lié au point Mi .
γ(G) est l’accélération du Centre
de Gravité.
Remarques:
La première équation vectorielle s’appelle : Equation de la résultante dynamique.
La deuxième équation vectorielle s’appelle : Equation des moments dynamiques.
3. SOLIDES EN MOUVEMENT DE TRANSLATION RECTILIGNE :
3.1. Cas du Mouvement Rectiligne Uniforme :
Dans ce cas, γMi = 0 ∀ i donc, γG = 0, on en déduit que :
{}
τSS
SS
SS
GG
/
/
/
()
()
=
=
=
r
r
rr
R
M
0
0
On retrouve l’expression du P.F.S. qui est donc valable aussi lorsque le système isolé a un
mouvement rectiligne uniforme.
3.2. Cas du Mouvement rectiligne Uniformément Varié :
Dans ce cas, γMi = Cte ∀ i donc, γG = Cte, on montre que :
{}
τγ
SS
SS G
SS
m
GG
/
/*()
/
()
()
=
=
=
r
r
rr
R
M0
Le plus souvent, seule l’équation de la résultante dynamique est utilisée.

C:\New Data\Lycée\Cours mécanique\2ème année\Cours dynamique BTS.doc L.D. 14/03/2005 PAGE 2/7
4. SOLIDES EN ROTATION AUTOUR D’UN AXE FIXE DE SYMETRIE
Mouvement de rotation / à un axe fixe ⇒ en tout point I de l’axe de rotation : V(I) = 0 et γ(I) = 0
Mouvement de rotation / à un axe de symétrie ⇒ G ∈ à l’axe de rotation donc γ(G) = 0
On montre que dans ce cas le principe s’écrit:
{}
τθ
SS
SS
SS G
Gz
G
IZ
/
/
/
()
() *&&
=
=
=
r
r
rr
R
M
0
où:
IGz est le moment d’inertie du solide par rapport à l’axe ( G, z ).
&&
θ est l’accélération angulaire du solide autour de l’axe ( G, z ).
z est l’axe de rotation.
4.1. Notion de moment d’inertie : (unité : kg.m2)
Dans le cas général, le calcul d’un moment d’inertie est complexe car il s’exprime par une intégrale
triple sur le volume.
L’expression générale pour le calcul d’un moment d’inertie par rapport à un axe (G, z ) est :
IGz
V
rdm
r=∫2* où: r est la distance du point M considéré à l’axe (G, z )
dm est l’élément de masse élémentaire liée au point M.
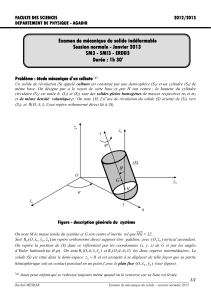
4.2. Exemple de calcul:
z
Calcul du moment d’inertie d’un cylindre plein par rapport à son axe de
symétrie de révolution.
- Choix de l’élément de volume:
- Calcul de l’élément de volume:
- Calcul du moment d’inertie :
4.3. Formulaire sur les moments d’inertie des principaux volumes :
G
S
z
R
h G

C:\New Data\Lycée\Cours mécanique\2ème année\Cours dynamique BTS.doc L.D. 14/03/2005 PAGE 3/7
Cylindre plein
de diamètre 2r
et de longueur 2l
m : masse du cylindre plein
V = π.r².2l :Volume
IGx = IOx = mr²
2
IGy = IGz = mr²
4 + ml²
3
IOy1 = IOz1 = mr²
4 + 4ml²
3
Cylindre creux
de diamètre
extérieur 2R,
de diamètre
intérieur 2r et de
longueur 2l
m : masse du cylindre creux
V = π.(R² - r²).2l :Volume
IGx = IOx = m(R²+r²)
2
IGy = IGz = m(R²+r²)
4 + ml²
3
IOy1 = IOz1 = m(R²+r²)
4 + 4ml²
3
Tige pleine
de diamètre
négligeable et de
longueur 2l
m : masse de la tige pleine
IGx = IOx = 0
IGy = IGz = ml²
3
IOy1 = IOz1 = 4ml²
3
Sphère de
Rayon r
m : masse de la sphère
V = 4πr3
3 : Volume
IGx = IGy = IGz = 2mr²
5

C:\New Data\Lycée\Cours mécanique\2ème année\Cours dynamique BTS.doc L.D. 14/03/2005 PAGE 4/7
Cône plein
de diamètre 2r
et de hauteur h
m : masse du cône plein
V = πr²h
3 :Volume
IGx = IOx = 3mr²
10
IGy = IGz = 3mr²
20 + 3mh²
5
IOy1 = IOz1 = 3mr²
20 + mh²
10
Parallélépipède
rectangle de
largeur b, de
hauteur h et de
longueur 2l
m : masse du parallélépipède
V = b.h.2l : Volume
IGx = IOx = m
12 (b²+h²)
IGy = m
12 (h²+4l²) IGz = m
12 (b²+4l²)
IOy1 = mh²
12 + 4ml²
3
IOz1 = mb²
12 + 4ml²
3
Tore
m : masse du tore
V = 2π²R r² : Volume
IGx = m
4 (4R²+3r²)

C:\New Data\Lycée\Cours mécanique\2ème année\Cours dynamique BTS.doc L.D. 14/03/2005 PAGE 5/7
5. SOLIDES EN ROTATION AUTOUR D’UN AXE FIXE (G n’appartenant pas à cet axe):
Le P.F.D. a pour expression :
{}
τ
γ
θ
SS
SS
SS A
m
Az
A
G
Z
I
/
/
/
()
()
*()
*&&
=
=
=
r
r
rr
R
M
avec: IAz = IGz + M*r2
Relation tirée du théorème de HUYGHENS
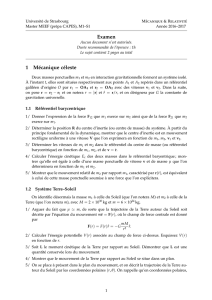
6. NOTION DE FORCE D’INERTIE: PRINCIPE D’ALEMBERT
r
r
r
R
()/*()SS G imF==−
γ
où : Fi est appelée force d’inertie.
Cette force Fi est opposée à l’accélération.
Dans le cas d’un mouvement de rotation autour d’un axe fixe différent de l’axe de symétrie de révolution,
la force centrifuge (comme l’accélération) en G peut être décomposée suivant deux directions principales:
- la normale à la trajectoire du point G: Fin = - m* γn = -m* [AG]* ω2* n
- la tangente à la trajectoire du point G: Fit = - m* γt = -m* [AG]* dω/dt * t
L’intérêt d’utiliser la notion de force d’inertie, est d’assimiler l’effet d’inertie à une force extérieure et de
pouvoir résoudre le problème comme un problème de statique. Dans ce cas, toutes les méthodes et
théorèmes abordés en statique sont utilisables.
G
n
t
Fin
Fi
t
ω dω/dt
AG
S (masse M)
z
r
 6
7
6
7
1
/
7
100%