Amplificateur opérationnel en régime linéaire

lyc´ee Ibn Taymia Ann´ee 2009-2010
PCSI–2 A.BADIR
Amplificateur op´erationnel
PSfrag replacements
1
2
3
45
6
7
8
Table des matieres
1Caract´eristiques 2
1.1 Pr´esentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Polarisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3 Amplification de diff´erence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3.1 Caract´eristique de transfert statique . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3.2 Mod´elisations de l’A.O r´eel. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2A.O. en boucle ouverte 5
3Montages de base en r´egime lin´eaire 5
3.1 Montage amplificateur non inverseur . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3.2 Montage inverseur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3.3 Montage sommateur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3.4 Montage soustracteur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.5 Montage int´egrateur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.5.1 Montage de principe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3.5.2 Montage pratique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3.6 Montage d´erivateur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3.6.1 Montage de principe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3.6.2 Montage pratique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
4Limitations non lin´eaires 9
4.1 Limitation en amplitude de la tension de sortie . . . . . . . . . . . . . . . . . . . . . . 9
4.2 Limitation de la pente du signal de sortie . . . . . . . . . . . . . . . . . . . . . . . . . 9
4.3 Limitation du courant de sortie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1

1Caract´eristiques
1.1 Pr´esentation
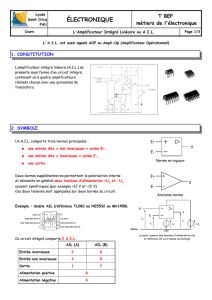
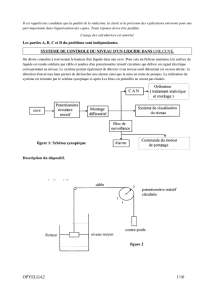
L’A.O. dans sa version standard se pr´esente sous forme d’un circuit int´egr´e `a 8 pattes (voir figure
1). Il a l’aspect d’un parall´el´epip`ede rectangle. Lorsqu’il est vu de dessus, une encoche ou un point
permet le rep´erage de ses bornes.
PSfrag replacements
1
2
3
45
6
7
8
A.O.
(a) Boˆıtier DIL d’un A.O.
PSfrag replacements
1 : r´eglage de la tension de d´ecalage ;
2 : entr´ee inverseuse −;
3 : entr´ee non inverseuse + ;
4 : polarisation n´egative (−Vcc) ;
5 : r´eglage de la tension de d´ecalage
(offset) ;
6 : sortie S;
7 : polarisation positive (+Vcc) ;
8 : non connect´ee.
(b) Description du brochage.
Fig. 1 – Amplificateur Op´erationnel (A.O.) vu de dessus (pattes vers le bas) et son brochage.
On utilise dans ce T.P. diff´erents types d’A.O correspondant `a des performances et `a des origines
(constructeurs) vari´ees : TL081, CA741, µA741.
Dans un sch´ema ´electrique On ne repr´esente en g´en´eral que les bornes d’entr´ee et de sortie de l’am-
plificateur op´erationnel de la fa¸con repr´esent´ee figure 2 :
_
PSfrag replacements
e−
e+
2
34
6
7
S
−
+
−Vcc
+Vcc
(a) Symbole fran¸cais ou europ´een.
_
PSfrag replacements
e−
e+
2
3
4
6
7
S
−
+
−Vcc
+Vcc
(b) Symbole anglo-saxon.
Fig. 2 – Diff´erents symboles d’un amplificateur op´erationnel . En g´en´eral on ne repr´esente pas les
broches d’alimentation 4 et 7.
1.2 Polarisation
L’Amplificateur op´erationnel est un composant actif, il n´ecessite deux alimentations : −VCC et
+VCC continues et sym´etriques par rapport `a un point milieu connect´e `a la r´ef´erence des potentiels
du circuit (la masse)
Une autre cons´equence de la structure interne de l’amplificateur op´erationnel est la n´ecessit´e de
le polariser avant toute utilisation (sous peine de destruction) et d’´eteindre cette polarisation
apr`es l’extinction de toutes les sources de signaux externes.
On a repr´esent´e figure 3, le circuit de polarisation de l’amplificateur op´erationnel (continue,
sym´etrique et `a point milieu `a la masse). On utilisera ce type d’alimentation dans tous les montages,
celle-ci ne sera par cons´equent plus repr´esent´ee sur les sch´emas de principe des circuits ´etudi´es.
2

PSfrag replacements
e−
e+
2
3
4
6
7
S
−
+−Vcc
+Vcc
PSfrag replacements
e−
e+
2
3
4
6
7
S
−
+
−Vcc
+Vcc
Fig. 3 – Circuit de polarisation sym´etrique de l’amplificateur op´erationnel.
1.3 Amplification de diff´erence
L’amplificateur op´erationnel (not´e A.O.) et un amplificateur diff´erentiel int´egr´e .
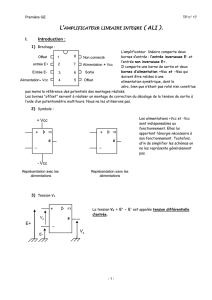
1.3.1 Caract´eristique de transfert statique
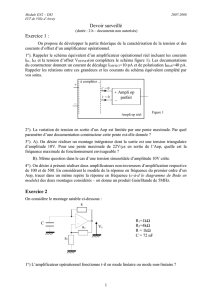
La caract´eristique de transfert statique en r´egime lentement variable a l’allure suivante :
PSfrag replacements
+Vsat
−Vsat
vs
εl
−εl
ε
Fig. 4 – Caract´eristique de transfert d’un amplificateur op´erationnel
Elle comporte :
IDeux parties horizontales −Vsat et +Vsat dans lesquelles l’A.O. fonctionne en r´egime satur´e
(ou non lin´eaire : vs=±Vsat . selon la valeur ε: si ε > 0 donc vs= +Vsat et si ε < 0 donc
vs=−Vsat
IUne partie lin´eaire dans laquelle l’A.O fonctionne en r´egime lin´eaire :vs=µε =µ(v+−v−)
Ceci est possible si −εl6ε6εlo`u εl=Vsat
µet −εl=−Vsat
µ
Ordre de grandeur :µ∼105, Vsat ∼15Vdonc εl∼0.15 mV
Le fonctionnement lin´eaire de l’A.O. n’est donc possible que pour des valeurs tr`es faibles de ε
1.3.2 Mod´elisations de l’A.O r´eel.
Un A.O. r´eel peut ˆetre mod´eliser comme le montre la figure suivante :
E
PSfrag replacements
ve
vs
Ze
Zs
VD
µε
3

>La tension VDest la tension de d´ecalage de l’A.O.
Ordre de grandeur : VD∼mV
* le 741 pour lequel VD= 2 mV et Ip−= 80 nA,
* le T L 081 pour lequel VD= 0,2mV et Ip−= 50 pA.
>L’imp´edance Zeest l’imp´edance diff´erentielle d’entr´ee de l’A.O.
Ordre de grandeur : Ze∼105`a 1012Ω
>L’imp´edance Zsest l’imp´edance diff´erentielle de sortie de l’A.O.
Ordre de grandeur : Zs∼10 `a 100Ω
>Bande passante(BP) : Un A.O. r´eel peut ˆetre mod´elis´e par un filtre passe-bas du premier
ordre :
PSfrag replacements
ve
vs
Gdb
log(f)
log(fc)
pente de -20dB/d´ecade
Sa fonction de transfert peut s’´ecrire sous la forme : µ=µo
1+jf
fc
.
Ordre de grandeur : fc∼10 `a 100Hz
Un A.O. id´eal est caract´eris´e par :
•µinfini
•Rdinfinie
•Rsnulle
•BP infinie
Cons´equences : Rdinfinie ⇒i−=i+= 0
La tension vs´etant finie et µinfini, la relation en r´egime lin´eaire ε=vs
µ⇒ε= 0
La caract´eristique statique de transfert pour un A.O. id´eal est la suivante :
PSfrag replacements
ve
vs
+Vsat
−Vsat
vs
ε
4

2A.O. en boucle ouverte
E
PSfrag replacements
vevs
v+=veet v−= 0 ⇒ε=vedonc si ve(t)>0alors vs= +vsat
si ve(t)<0alors vs=−vsat
La figure ci-dessous repr´esente les chronogrammes de veet de vspour diff´erentes formes de la tension
de ve
PSfrag replacements
ve
vs
mode XY
En permutant les bornes (+) et (-), on aura ε=−ve⇒si ve(t)>0alors vs=−vsat
si ve(t)<0alors vs= +vsat
Remarque : La tension vsest ind´ependante de la forme de ve.
Conclusion :L’A.O en boucle ouverte fonctionne toujours en r´egime satur´e.
Pour que le fonctionnement en r´egime lin´eaire soit possible, l’A.O. doit ˆetre
boucl´e (la sortie est li´ee `a l’entr´ee (−))
3Montages de base en r´egime lin´eaire
3.1 Montage amplificateur non inverseur
Le montage est le suivant :
E
PSfrag replacements
vevs
mode XY
C
R1
R2
R0
Faisons l’hypoth`ese d’un A.O. id´eal en r´egime lin´eaire (ε= 0) que l’on v´erifiera exp´erimentalement.
ε= 0 →v+=−v−
Or v+=veet v−=R1
R1+R2vs⇒vs= (1 + R2
R1
)ve
Il s’agit alors d’un montage non inverseur (vset vesont de mˆeme signe) d’amplification A=vs
ve
= (1 + R2
R1
)
>Imp´edance d’entr´ee : Ze=ve
ieest infinie car ie=i+= 0
5
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%