INTRODUCTION : MISE EN SITUATION :

Evaluation siège 406 – Etude de F17 Page 1 / 17
INTRODUCTION :
Certaines versions du coupé Peugeot 406 proposent des automatismes intégrés à
l’habitacle :
ordinateur de bord
rétroviseur électrique
siège électrique
C’est l’automatisme siège électrique que nous allons étudier dans ce dossier : nous le
nommerons « siège 406 ».
MISE EN SITUATION :
Ce siège 406, en option, a été conçu pour optimiser le confort du conducteur. Le siège a
été dessiné en tenant compte de la morphologie humaine et des contraintes ergonomiques
liées à son utilisation.
Son utilisation est la suivante (extrait du guide d’utilisation du coupé Peugeot 406) :
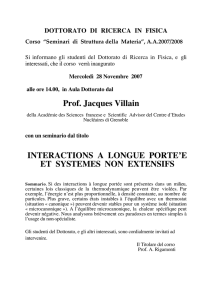
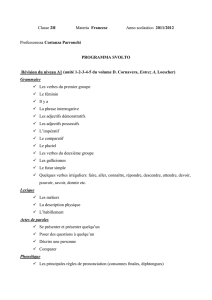
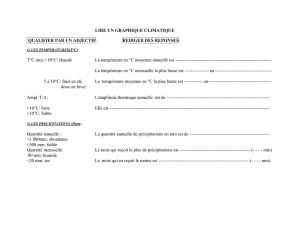
Réglages électriques du siège conducteur :
A- Réglage longitudinal (glissières) :
Poussez la commande vers l’avant (AV)
ou vers l’arrière (AR) pour faire coulisser le
siège.
B- Réglage de l’inclinaison de l’assise (site) :
Basculez la partie avant de la
commande vers le haut (MONT) ou vers le bas
(DESC) pour basculer l’avant du siège vers le
haut ou vers le bas.
C- Réglage en hauteur (rehausse) :
Basculez la partie arrière de la
commande vers le haut (MONT) ou vers le bas
(DESC) pour monter l’assise ou la descendre.
D- Réglage de l’inclinaison du dossier
(dossier):
Basculez la commande vers l’avant
(AV) ou vers l’arrière (AR) pour incliner le
dossier vers l’avant ou vers l’arrière.
E- Basculement du dossier (manuel) :
Pour accéder aux places arrière, tirez la commande et basculez le dossier vers l’avant.
Tant que vous maintenez le dossier basculé, le siège avance automatiquement en grande vitesse et
permet de libérer l’accès aux places arrière.
Lors de la remise en place du dossier vers l’arrière, le siège reprend automatiquement en grande vitesse
ses réglages.

Evaluation siège 406 – Etude de F17 Page 2 / 17
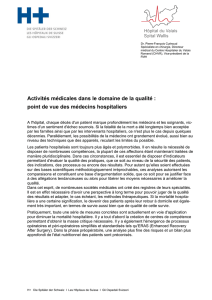
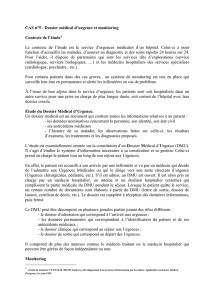
Mémorisation des positions et rappel d’une position
Les trois touches de mémorisation sont situées sur le coté du siège :
Il faut la présence de la clé de contact pour mémoriser et pour rappeler une position.
Mémorisation des positions de conduite
Vous avez la possibilité de mémoriser deux positions de conduite.
Pour mémoriser, vous devez :
régler votre siège dans la position souhaitée
appuyer en permanence sur la touche M du clavier et appuyer en simultané dans les 4 secondes
sur la touche 1 du clavier (première position de conduite) ou sur la touche 2 du clavier (deuxième position
de conduite).
Remarques :
- La prise en compte de la mémorisation se signale par deux bips.
- La mémorisation d’une nouvelle position annule la précédente.
Rappel d’une position mémorisée
Pour rappeler une position mémorisée, vous devez :
appuyer en permanence sur la touche 1 du clavier (première position mémorisée) ou sur la
touche 2 du clavier (deuxième position mémorisée) jusqu’à l’arrêt automatique du siège.
Remarque :
Si vous relâchez la touche de rappel (1 ou 2) pendant le mouvement, le siège stoppe
immédiatement à la position courante.
La fin de la phase rappel est signalée par un bip.

Evaluation siège 406 – Etude de F17 Page 3 / 17
PRESENTATION DE LA FONCTION F17 «Adapter en puissance» :
Le siège est mis en mouvement grâce à 5 moteurs à courant continu. Les commandes des
moteurs sont des différences de potentiels analogiques permettant de commander les
moteurs conformément aux réglages demandés.
+12V : commande du moteur dans le sens positif (AV, MONT),
-12V : commande du moteur dans le sens négatif (AR, DESC),
0V : arrêt du moteur.
Notation pour le tout le dossier :
L’indication MVT renvoie d’une manière générale aux 4 déplacements du siège à savoir GLI,
REHA, SITE et DOS. - On parlera de MVT pour parler d’un des signaux des quatre mouvements que
sont GLI pour glissière, REHA pour rehausse, SITE pour site et DOS pour dossier.
Ex : POS_MVT désigne les 4 signaux POS_GLI, POS_DOS, …
- On utilisera SENS pour citer un des deux sens de chaque mouvement, à savoir AV pour avant ou
AR pour arrière et MONT pour montée ou DESC pour descente.
Exemple : les signaux POS_GLI_SENS sont les signaux POS_GLI_AV et POS_GLI_AR.
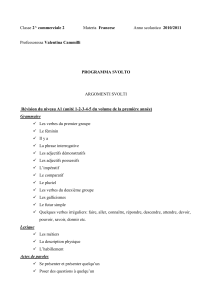
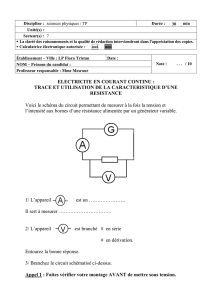
La fonction F17 : « Adapter en puissance » permet d’élaborer les signaux de commande des
moteurs à partir des signaux fournis par le microcontrôleur PIC 16F877.
Fonction F17 : « Adapter en puissance »
Entrées :
COM_MVT_SENS sont des différences de potentiels 0V-5V : COM_MVT_SENS sont au niveau
logique haut lorsque le moteur correspondant au mouvement défini par MVT doit tourner dans le sens
défini par SENS.
GR_VIT sont des variables numériques sur 1 bit 0V-5V représentant la commande du moteur
glissière et sa vitesse : GR_VIT est au niveau logique bas quand on commande le moteur correspondant à
la glissière en petite vitesse, et, au niveau logique haut en grande vitesse.
COM_DIRECT_MVT_SENS sont des signaux qui sont au niveau logique bas si les signaux
APPUI_BP_MVT_SENS correspondants sont actifs, et à l’état haute impédance sinon. Ils commandent
directement les moteurs correspondants (BP_MVT_SENS sont des différences de potentiels numériques
0V-5V qui sont au niveau logique bas quand les signaux APPUI_BP_MVT_SENS correspondants sont
actifs, c’est à dire, quand on appuie sur le bouton poussoir correspondant).

Evaluation siège 406 – Etude de F17 Page 4 / 17
Sorties :
Commandes des moteurs : VMOT_GLI_PV, VMOT_GLI_GV, VMOT_REHA, VMOT_SITE, VMOT_DOS sont des
différences de potentiels -12V, 0V ou 12V.
Fonctions de transfert :
On considère dans ces tableaux la commande individuelle de chaque moteur. En réalité, on
peut commander les quatre mouvements en même temps. On considère aussi que les moteurs
Grande Vitesse et Petite Vitesse pour le mouvement de la glissière ne sont pas couplés.
Les moteurs sont commandés soit lors d’un rappel d’une position mémorisée (élaboration des
signaux de commande des moteurs par un microcontrôleur), soit lors d’une demande de
déplacement l’utilisateur à l’aide du clavier (commande directe des moteurs par les
interrupteurs).
Tableau représentant une commande par les fonctions F15 « Gérer la vitesse glissière » et F16
« Rappeler une position » :
COM_MVT_SENS VMOT_GLI_PV
VMOT_GLI_GV
VMOT_REHA
VMOT_SITE
VMOT_DOS
GR_VIT=0
COM_GLI_AV=1 +12V 0V 0V 0V 0V
GR_VIT=0
COM_GLI_AR=1 -12V 0V 0V 0V 0V
GR_VIT=1
COM_GLI_AV=1 0V +12V 0V 0V 0V
GR_VIT=1
COM_GLI_AR=1 0V -12V 0V 0V 0V
GR_VIT=0
COM_REHA_AV=1
0V 0V +12V 0V 0V
GR_VIT=0
COM_REHA_AR=1
0V 0V -12V 0V 0V
GR_VIT=0
COM_SITE_AV=1 0V 0V 0V +12V 0V
GR_VIT=0
COM_SITE_AR=1 0V 0V 0V -12V 0V
GR_VIT=0
COM_DOS_AV=1 0V 0V 0V 0V +12V
GR_VIT=0
COM_DOS_AR=1 0V 0V 0V 0V -12V
Tableau représentant une commande directe par appuis sur les boutons poussoirs :
COM_DIRECT_MVT_SENS VMOT_GLI_PV
VMOT_GLI_GV
VMOT_REHA
VMOT_SITE
VMOT_DOS
COM_DIRECT_GLI_AV=0V +12V 0V 0V 0V 0V
COM_DIRECT_GLI_AR=0V -12V 0V 0V 0V 0V
COM_DIRECT_GLI_AV=0V 0V +12V 0V 0V 0V
COM_DIRECT_GLI_AR=0V 0V -12V 0V 0V 0V
COM_DIRECT_REHA_AV=0V
0V 0V +12V 0V 0V
COM_DIRECT_REHA_AR=0V
0V 0V -12V 0V 0V
COM_DIRECT_SITE_AV=0V 0V 0V 0V +12V 0V
COM_DIRECT_SITE_AR=0V 0V 0V 0V -12V 0V
COM_DIRECT_DOS_AV=0V 0V 0V 0V 0V +12V
COM_DIRECT_DOS_AR=0V 0V 0V 0V 0V -12V
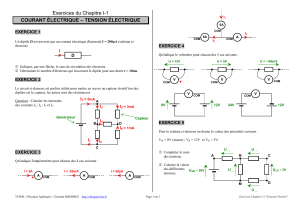
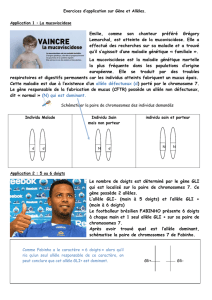
Afin de mieux comprendre comment se fait l’adaptation en puissance, la fonction F17 :
« Adapter en puissance » peut se décomposer en 2 fonctions :

Evaluation siège 406 – Etude de F17 Page 5 / 17
Fonction F171 : « Amplifier en puissance »
Entrées :
COM_MVT_SENS
GR_VIT
Energie électrique
Sortie :
COM_MVT_SENS_AMPL différences de potentiels analogiques 0V-12V
GR_VIT_AMPL différences de potentiels analogiques 0V-12V
Fonction de transfert :
Lorsque les différences de potentiels COM_MVT_SENS sont égales à 0V alors les différences
de potentiels COM_MVT_SENS_AMPL correspondantes sont égales à 12V.
Lorsque les différences de potentiels COM_MVT_SENS sont égales à 5V alors les différences
de potentiels COM_MVT_SENS_AMPL correspondantes sont égales à 0V.
Le fonctionnement est identique avec les signaux GR_VIT et GR_VIT_AMPL.
Fonction F172 : « Distribuer l’énergie »
Entrées :
COM_MVT_SENS_AMPL
COM_DIRECT_MVT_SENS
Energie électrique
Sortie :
Commandes des moteurs : VMOT_GLI_PV, VMOT_GLI_GV, VMOT_REHA, VMOT_SITE, VMOT_DOS sont des
différences de potentiels –12V, 0V et 12V.
Fonction de transfert :
Lorsqu’ aucune commande n’est active, alors les signaux de commande des moteurs
sont à 0V.
Lorsque les commandes COM_MVT_AV_AMPL (ou MONT) ou
COM_DIRECT_MVT_AV (ou MONT) sont égales à 0V, les différences de potentiels de
commande des moteurs correspondantes sont égales à +12V.
Lorsque les commandes COM_MVT_AR_AMPL (ou DESC) ou
COM_DIRECT_MVT_AR (ou DESC) sont égales à 0V, les différences de potentiels de
commande des moteurs correspondantes sont égales à -12V.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
6
7
8
9
10
11
12
13
14
15
16
17
18
19
1
/
19
100%