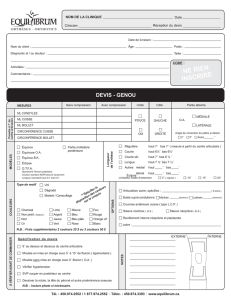
Dynamique Inverse : Principes et Applications

Dynamique inverse
CH II

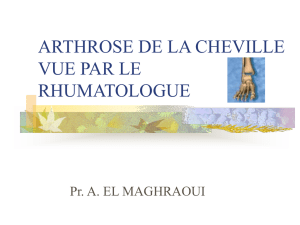
Dynamique inverse :
DI
Cinématique
(déplacements, vitesses,
accélérations
Moment musculaire
résultant
Anthropométrie
(longueur, masses, CdG,
moments d’inertie)
Force articulaire de
compression
Cinétique
(Force et Moment
externes)
Force articulaire de
cisaillement

La dynamique inverse repose sur :
•Le principe fondamental de la statique si le segment est au
repos dans un repère R
•Le principe fondamental de la dynamique si le segment est en
mouvement par rapport à un repère R
•Le principe d’action - réaction
Dynamique inverse :
La dynamique inverse est une méthode itérative (de segment en
segment) qui permet d’estimer le moment musculaire résultant et les
deux composantes de l’effort de réaction articulaire à chaque
articulation en conditions statiques ou dynamiques à partir du bilan
des forces du segment proximal ou du segment distal.

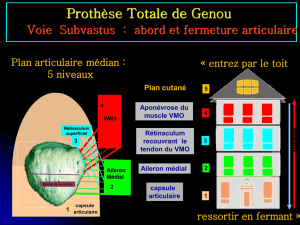
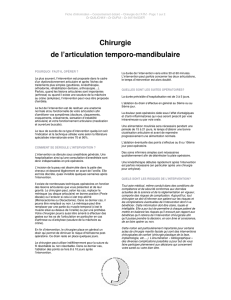
Anthropométrie (Winter, Allard & Blanchi)
Masses segmentaires
Masses segmentaires
0.0145
0.0465
0.1000
0.4970
0.0810
0.0280
0.0160
0.0060
HAT = 0.678
0.0145
0.0465
0.1000
0.4970
0.0810
0.0280
0.0160
0.0060
HAT = 0.678
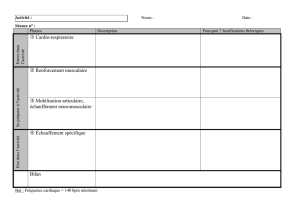
Longueurs segmentaires
Longueurs segmentaires
H
0.936H
0.870H
0.818H
0.630H
0.465H
0.377H
0.129H
0.186H 0.146H 0.108H
0.520H
0.130H
0.520H
0.285H
0.259H
0.039H
Longueur du pied : 0.152HLargeur du pied : 0.055H
Longueurs segmentaires
Longueurs segmentaires
H
0.936H
0.870H
0.818H
0.630H
0.465H
0.377H
0.129H
0.186H 0.146H 0.108H
0.520H
0.130H
0.520H
0.285H
0.259H
0.039H
Longueur du pied : 0.152HLargeur du pied : 0.055H
H
0.936H
0.870H
0.818H
0.630H
0.465H
0.377H
0.129H
0.186H 0.146H 0.108H
0.520H
0.130H
0.520H
0.285H
0.259H
0.039H
Longueur du pied : 0.152HLargeur du pied : 0.055H
Centres de masse
Centres de masse

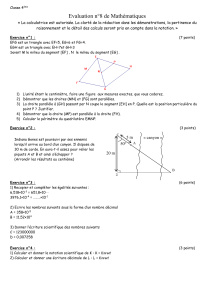
Dynamique inverse :
biceps
M
triceps
M
•Moment musculaire résultant : somme vectorielle des moments
de force développés par chaque muscle agissant autour d’une
articulation.
•Force articulaire de compression :
composante verticale de la force de
réaction articulaire.
•Force articulaire de cisaillement :
composante horizontale de la force de
réaction articulaire.
Comp
F
Res
M
Cis
F
 6
7
8
9
10
11
12
6
7
8
9
10
11
12
1
/
12
100%