1- Adapter l`énergie électrique 1

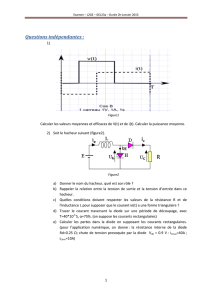
Les adaptateurs d’énergie 1ère partie source : http://www.energieplus-lesite.be, Patrice Hérisson Lycée Touchard LE MANS
Académie de Nantes / www.mysti2d.net, Technologie tome 2 Hachette+internet
1/14
Rédaction Marc VINCENT
1- Adapter l’énergie électrique
Afin d’adapter l’énergie électrique aux besoins, il existe plusieurs solutions suivant la
nature de la charge. Nous nous intéresserons ici au problème de l’adaptation de l’énergie
électrique pour le raccordement au réseau de distribution et de transport, au problème de
la variation de vitesse des moteurs à courant continu et à la variation de puissance pour des
systèmes fonctionnant en tension alternative.
1-1 Le transformateur
Le rôle principal d’un transformateur est d’augmenter la tension à la sortie d’une centrale
de production pour pouvoir transporter l’électricité en diminuant les pertes, puis de
l’abaisser pour effectuer sa distribution.
Exemple :

Les adaptateurs d’énergie 1ère partie source : http://www.energieplus-lesite.be, Patrice Hérisson Lycée Touchard LE MANS
Académie de Nantes / www.mysti2d.net, Technologie tome 2 Hachette+internet
2/14
Rédaction Marc VINCENT
La figure ci-contre représente le type de
transformateur utilisé sur l’île de EL Hierro pour
l’alimentation de la partie commande des pompes.
Il s’agit d’un transformateur monophasé dont le
schéma de principe est représenté ci dessous . Il est
composé d’un circuit magnétique sur lequel sont
enroulés deux bobines (primaire et secondaire). La
convention utilisée généralement est récepteur au
primaire et générateur au secondaire.
L’enroulement du primaire comporte N1 spires et l’enroulement du secondaire en
comporte N2.
Avec les conventions de la figure ci-dessus, il est possible d’obtenir le rapport de
transformation grâce à la formule suivante :
i1 / i2 = U2 / U1 = N2 / N1 = -m
La figure ci-dessus représente le schéma équivalent d’un transformateur réel. R1 et R2 sont
les résistances des enroulements au primaire et au secondaire, L1 et L2 sont les inductances
dite de « fuite », Rf et L représentent le comportement de la bobine à noyau de fer.
Un transformateur réel est le siège de pertes : les pertes cuivre et les pertes Fer.
Les pertes cuivre sont les pertes par effet Joule. Pj = R1×(I1)2 + R2×(I2)2
Les pertes Fer dépendent de la fréquence du courant électrique. Elles ont dues à des
phénomènes d’hystérésis ou à l’existence de courants de Foucault. Elles se notent PF.

Les adaptateurs d’énergie 1ère partie source : http://www.energieplus-lesite.be, Patrice Hérisson Lycée Touchard LE MANS
Académie de Nantes / www.mysti2d.net, Technologie tome 2 Hachette+internet
3/14
Rédaction Marc VINCENT
Les transformateurs utilisés lors du transport de l’électricité sont des transformateurs
triphasés. Afin de brancher un transformateur, il faut réaliser son couplage. Le couplage est
l’interconnexion des enroulements entre eux. Ils sont choisis en fonction de la tension du
primaire et celle du secondaire.
Les enroulements du primaire peuvent être couplés en étoile ou triangle. Les enroulements
du secondaire peuvent être couplés en étoile ou triangle.
Dans le cas d’un transformateur triphasé, le rapport de transformation s’exprime comme le
rapport entre la tension du secondaire à vide et la tension primaire.
1-2 Convertisseur continu /continu
Pour tout véhicule à motorisation électrique, le problème de la variation de vitesse se pose.
Exemple : Le CYCAB
Le CYCAB fonctionne avec 4 moteurs électriques à courant
continu d’une puissance de 1kW alimenté par des batteries
de 48V continu. Ces moteurs doivent pouvoir fonctionner
dans les deux sens de marche ( avant et arrière). La
solution retenue par le constructeur pour faire
varier la vitesse est un convertisseur
continu/continu appelé hacheur.
Hacheur 1 quadrant
Le hacheur le plus simple est le hacheur 1 quadrant, T1 représente l’interrupteur
commandé.

Les adaptateurs d’énergie 1ère partie source : http://www.energieplus-lesite.be, Patrice Hérisson Lycée Touchard LE MANS
Académie de Nantes / www.mysti2d.net, Technologie tome 2 Hachette+internet
4/14
Rédaction Marc VINCENT
Les hacheurs convertissent une tension continue fixe en une tension continue variable.
Evolution temporelle des signaux d’un hacheur 1 quadrant
Le calcul de la valeur moyenne de la tension aux bornes du moteur se fait en utilisant la
formule suivante : U moteur = × V max
où U moteur est la valeur moyenne de la tension aux bornes du moteur, est le rapport
cyclique du signal de commande et V max est la tension de la batterie.
Rappel : Le rapport cyclique pour
un signal rectangulaire, noté α, est défini
comme étant le rapport existant entre la durée
du temps haut (tH) du signal et sa période (T).
Quand on utilise un
voltmètre pour mesurer
une tension alternative
sinusoïdale, il ne nous
affiche pas la tension maxi.
Le voltmètre nous affiche la
tension efficace.

Les adaptateurs d’énergie 1ère partie source : http://www.energieplus-lesite.be, Patrice Hérisson Lycée Touchard LE MANS
Académie de Nantes / www.mysti2d.net, Technologie tome 2 Hachette+internet
5/14
Rédaction Marc VINCENT
Dans le cas du Cycab, le moteur doit
pouvoir tourner dans les deux sens de
rotation, par conséquent, la tension
d’alimentation du moteur doit pouvoir être
négative. Ce qui n’est pas possible avec un
hacheur 1 quadrant. Nous utilisons alors un
hacheur 4 quadrants.
La figure ci-dessus présente le schéma de principe d’un hacheur 4 quadrants
également appelé pont en H de par sa forme. Sur ce schéma, T1, T2, T 3 et T4 sont des
interrupteurs commandés. Pour éviter les courts-circuits sur la batterie, les interrupteurs T1
et T2 ne sont pas fermés en même temps. Il en est de même pour les interrupteurs T2 et T4.
La figure ci-contre explique la logique de
fonctionnement du pont en H. On voit
apparaître le sens du courant et sens de la
tension pour les deux sens de marche.
T1 (TR7), T2 (TR5), T3 (TR8) et T4 (TR6)
La figure ci-contre représente l’évolution
temporelle du signal de commande des
interrupteurs T1/T4 et T2/T3, l’état des
interrupteurs ainsi que la tension aux bornes
du moteur. Les interrupteurs T1 et T4 sont
actionnés au même moment ainsi que les
interrupteurs T2 et T3.
Le calcul de la valeur moyenne de la tension aux bornes du moteur se fait en utilisant la
formule suivante : U mot = (2×-1)×V Max
où U mot est la valeur moyenne de la tension aux bornes du moteur , est le rapport
cyclique du signal de commande et V Max est la tension de la batterie.
 6
7
8
9
10
11
12
13
14
6
7
8
9
10
11
12
13
14
1
/
14
100%