Chp 2 les lois de la mecanique - Enseignement des Sciences

Terminale S_Thème 2_COMPRENDRE : LOIS ET MODELES
chapitre 2_Les lois de la mécanique newtonienne
M.Meyniel 1/6
THEME
COMPRENDRE
Sous -thème
Temps, mouvement et évolution
Chapitre 2 : LES LOIS DE LA MECANIQUE : LA MECANIQUE NEWTONIENNE
NOTIONS ET CONTENUS
COMPETENCES ATTENDUES
Référentiel galiléen.
Deuxième loi de Newton.
- Mettre en œuvre les lois de Newton pour étudier des
mouvements dans des champs de pesanteur et
électrostatique uniformes.
SOMMAIRE
I. Mouvement d’un point.
1. Le référentiel d’étude.
2. Le vecteur position
.
3. Le vecteur vitesse .
4. Le vecteur accélération .
5. Exemples de mouvement
II. Les trois lois de la mécanique : les lois de Newton (1 666)
1. La première loi de Newton : le principe d’inertie.
2. La troisième loi de Newton : le principe des actions réciproques.
3. La deuxième loi de Newton : le principe fondamental de la dynamique.
a. La quantité de mouvement.
b. Enoncé de la deuxième loi.
ACTIVITE
Activité documentaire : Une histoire de seconde
Annexe : Document sur les référentiels
Activité expérimentale : Approche des lois de Newton
La quantité de mouvement
EXERCICES
5 ; 14 ; 19 p 175-178 + 12 ; 16 ; 19 p 175-178
MOTS CLES
Champ de pesanteur, champ uniforme, poids, relation fondamentale de la dynamique, projection et
intégration, équations horaires du mouvement, trajectoire, champ électrique.

Terminale S_Thème 2_COMPRENDRE : LOIS ET MODELES
chapitre 2_Les lois de la mécanique newtonienne
M.Meyniel 2/6
O
x
y
z
i
j
k
LA MECANIQUE NEWTONIENNE
Toute démarche scientifique débute par l’observation comme nous l’avons « vu » à travers la première
partie. Dès lors, on peut émettre des hypothèses afin d’établir des lois et modèles permettant de comprendre
le fonctionnement d’un système et de prédire son comportement. C’est tout l’objet de cette deuxième partie de
l’année comme nous l’avons commencé en chimie avec la « Représentation spatiale des molécules ».
Dans la première partie de l’année, nous avons notamment pu observer que certaines ondes présentent un
caractère périodique amenant certaines propriétés. Mais la périodicité s’avère très utile aussi pour mesurer
le temps !
Comment exploiter des phénomènes périodiques pour mesurer le temps ?
C’est ce sur quoi nous allons tout d’abord nous interroger.
En effet, l’Homme a depuis toujours été à la recherche d’étalon de temps pour rythmer sa vie sociale,
religieuse et professionnelle avec une précision toujours plus nécessaire et fine.
Le temps a ainsi, dès le début, été inscrit comme une variable naturelle des phénomènes évolutifs notamment
dans le domaine de la mécanique avec les travaux de Newton (qui étudia les évolutions en fonction du temps).
Cette considération lui a permis alors d’établir les notions de conservation d’énergie et de quantité de
mouvement.
On se propose de revenir ici sur ces notions et avant d’en estimer les limites pour comprendre ce qui a pu
amener la remise en cause du critère de relativité ou non du temps par Einstein au début du XXème siècle et de
nos jours. (la vitesse relative de la lumière et un temps absolu, au profit d’une vitesse de la lumière absolue (cette
invariance ayant été largement confirmée par l’expérience) et un temps relatif (validé par les notions afférentes [temps
propre et temps mesuré, la dilatation des durées …] et les observations [GPS, horloges atomiques embarquées …]).
Afin de mener cette recherche, nous allons reprendre le cheminement historique pour comprendre
l’évolution progressive des notions utilisées. Pour cela, il convient d’établir les modèles et lois à utiliser dans
la mécanique dite classique, celle où le temps constitue la variable naturelle. C’est tout l’objet de ce cours.
I. Mouvement d’un point.
1. Le référentiel d’étude.
Un système mécanique est un objet (ou un ensemble d’objets) dont on étudie le mouvement, les
forces qu’il subit.
* Le mouvement du système est caractérisé par sa trajectoire et sa vitesse.
Il dépend du référentiel dans lequel on l’étudie.
* Le référentiel se compose :
- d’un solide de référence par rapport auquel on étudie la trajectoire,
- d’une horloge permettant de repérer les dates à chaque position.
Ex : Le référentiel héliocentrique (pour l’étude des mouvements dans le système solaire) ;
le référentiel géocentrique (pour l’étude des mouvements autour de la Terre) ;
les référentiels terrestres (pour l’étude des mouvements sur Terre ou à son voisinage).
Rq : * Le solide de référence est rattaché à un repère d’espace (O, , ,
) comme en mathématique.
Voir l’activité documentaire « Une histoire de seconde »

Terminale S_Thème 2_COMPRENDRE : LOIS ET MODELES
chapitre 2_Les lois de la mécanique newtonienne
M.Meyniel 3/6
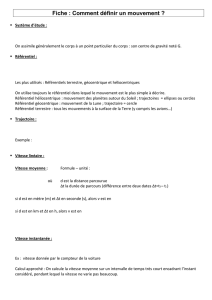
2. Le vecteur-position
.
Lorsqu’un solide est en mouvement, il existe un point particulier qui
décrit un mouvement plus simple que les autres, ce point est appelé le centre
d’inertie G du solide. (Il s’agit du barycentre des masses.)
Dans un référentiel donné, à tout instant t, un point G est repéré par son
vecteur-position
:
Rq : *
z
y
x
sont les coordonnées du vecteur-position
* Si le repère est orthonormé :
* Les positions occupées successivement par le point G au cours
du temps constitue la trajectoire.
3. Le vecteur-vitesse
.
Le vecteur-vitesse
caractérise la variation du vecteur-position
en fonction du temps.
Dans un référentiel donné, à chaque instant t, le vecteur-
vitesse instantanée
d’un point G correspond à la dérivée du
vecteur position
par rapport au temps :
Applications : Il n’est pas possible de calculer la vitesse de façon instantanée.
=> Pour s’en approcher au plus près, on estime un intervalle de temps ou une distance parcourue
minimum.
Les caractéristiques du vecteur-vitesse sont alors :
* origine : point considéré à l’instant t ;
* direction : tangent à la trajectoire ;
* sens : celui du mouvement ;
* intensité : v3 en m.s-1.
Rq : * Coordonnées :
* En repère orthonormé :
²²² zyx vvvvv
* Vecteur vitesse moyenne :
↔ vecteur vitesse instantanée :
4. Le vecteur-accélération .
Le vecteur-accélération
caractérise la variation du vecteur-vitesse en fonction du temps.
Dans un référentiel donné, à chaque instant t, le vecteur-
accélération instantanée
d’un point G correspond à la dérivée du
vecteur vitesse
par rapport au temps :
Faire une analyse dimensionnelle
Rq : * Coordonnées :
𝒂𝑮𝒕
𝒅𝒗
𝒅𝒕 𝒅𝒗𝒙
𝒅𝒕 𝒊
𝒅𝒗𝒚
𝒅𝒕 𝒋
𝒅𝒗𝒛
𝒅𝒕 𝒌
m.s-2
s
m.s-1
𝒗𝑮𝒕
𝒅𝑶𝑮
𝒅𝒕 𝒅𝒙
𝒅𝒕 𝒊
𝒅𝒚
𝒅𝒕 𝒋
𝒅𝒛
𝒅𝒕 𝒌
m.s-1
s
m
O
x
y
z
i
j
k
G0
G1
G3
G4
OG0
G2
V2
(Cf Pithagore)
𝑶𝑮
𝑮
2D puis 3D pour expliquer

Terminale S_Thème 2_COMPRENDRE : LOIS ET MODELES
chapitre 2_Les lois de la mécanique newtonienne
M.Meyniel 4/6
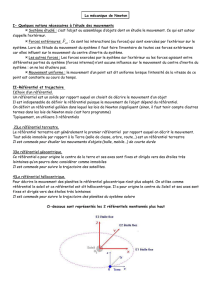
Détermination graphique du vecteur accélération : Cf. AE 11
Ex : A la date t2 :
* on trace le vecteur
13 vvv
;
* le vecteur
2
a
a même direction et sens que
v
;
* on divise par l’intervalle de temps pour obtenir
2
a
.
5. Exemples de mouvement.
Le mouvement rectiligne uniforme :
Trajectoire : droite.
Vitesse : constante car les points sont équidistants OU le vecteur-vitesse est
constant.
L’accélération est : nulle
(à faire deviner d’après ppt)
Le mouvement rectiligne accéléré :
Trajectoire : droite.
Vitesse : augmentant car les positions sont de plus en plus espacées.
Accélération : non nulle et positive ;
Rq : Si
et
ont le même sens (soit . > 0) alors le mouvement est uniformément accéléré (uniformément ralenti sinon).
Le mouvement circulaire uniforme :
Trajectoire : cercle. Vitesse : constante en norme.
Accélération : non nulle, radiale et centripète.
Le mouvement circulaire non uniforme :
Trajectoire : cercle. Vitesse : non constante.
Accélération : non nulle et non radiale.
II. Les trois lois de la mécanique : les lois de Newton (1 666).
Les mouvements se déterminent grâce aux trois lois de la mécanique.
1. La première loi de Newton : le principe d’inertie
Dans un référentiel galiléen, si la somme vectorielle des forces extérieures s’exerçant sur un système
est nulle, alors son centre d’inertie est soit immobile, soit animé d’un mouvement rectiligne uniforme
(trajectoire droite et vitesse constante), et réciproquement.
cstev0F Gext
Rappel : Les référentiels dans lesquels le principe d’inertie est valable sont appelés des référentiels galiléens
=> Les référentiels héliocentrique et géocentrique sont galiléens, comme tout
référentiel en translation rectiligne uniforme par rapport à un référentiel galiléen.
=> Le référentiel terrestre est considéré comme galiléen lorsque l’expérience
étudiée est de courte durée (< 1 h 50 min) ≠ manège (forces se compensent mais pas mvm rect. unif.)
Rq : * Un système soumis à aucune force est dit isolé.
* On ne considère que les forces extérieures car les forces intérieures s’annulent deux à deux (Cf 3ème loi).
* La première loi ne s’applique qu’au centre d’inertie du solide (tout comme la 2ème loi). Elle ne dit rien sur le
mouvement des autres points. Dans la suite du cours, nous ne nous intéresserons plus qu’aux mouvements du centre d’inertie.
13
13
22
2tt vv
t
v
dt
vd
a

Terminale S_Thème 2_COMPRENDRE : LOIS ET MODELES
chapitre 2_Les lois de la mécanique newtonienne
M.Meyniel 5/6
2. La troisième loi de Newton : le principe des actions réciproques
Lorsque deux corps A et B sont en interaction, A exerce sur B la force
et B exerce sur A la
force
telles que :
Elles ont même direction, des sens opposés et même intensité F.
Rq : * Les corps peuvent être au repos ou en mouvement.
* Ce principe est vrai dans tous les référentiels, galiléen ou non.
C’est cette loi qui explique le principe de la propulsion (roue motrice, fusée, poulpe …)
3. La deuxième loi de Newton : le principe fondamental de la dynamique : PFD
a. La quantité de mouvement.
Un vélo et un camion avançant à la même vitesse ne possède pas la même énergie du fait de leur masse. L’étude
du mouvement nécessite une nouvelle grandeur tenant compte de la masse : la quantité de mouvement.
Le vecteur-quantité de mouvement
d’un objet correspond au produit de sa
masse m par le vecteur-vitesse
de son centre d’inertie à l’instant t considéré :
b. Enoncé de la deuxième loi.
Dans un référentiel galiléen, la variation du vecteur-quantité de mouvement
d’un système par rapport au temps est égale à la somme des forces extérieures
appliquées à ce système :
Autre écriture : Analyse dimensionnelle
Rq : *
m
F
aext
G
Si la masse augmente, alors l’accélération diminue. Il est plus facile de pousser le vélo que le camion …
* Cas particulier :
0Fext
alors
0aG
et, par conséquent,
est constant en direction, sens et
norme. On retrouve le principe d’inertie (1ère loi).
NB : Le vecteur-quantité de mouvement d’un système isolé reste constant.
Il y a conservation de la quantité de mouvement :
. Cf AE 12
Conclusion : Nous possédons dorénavant les outils nécessaires à l’étude des systèmes mécaniques et de leur
évolution au cours du temps. Nous allons donc pouvoir les appliquer à divers systèmes avant de voir plus tard les
limites de nos études et la remise en question possible d’un temps absolu ou non.
Compétences
- Extraire et exploiter des info relatives à la mesure du temps pr justifier l’évolution de la définition de la seconde.
- Choisir un référentiel d’étude.
- Définir et reconnaître des mouvements (rectiligne uniforme, rectiligne uniformément varié, circulaire uniforme,
circulaire non uniforme) et donner dans chaque cas les caractéristiques du vecteur accélération.
- Définir la quantité de mouvement d’un point matériel.
- Connaître et exploiter les trois lois de Newton.
- Mettre en œuvre une démarche expérimentale pour étudier un mouvement.
- Mettre en œuvre une démarche expérimentale pour interpréter un mode de propulsion par réaction à l’aide d’un bilan
qualitatif de quantité de mouvement.
kg.m.s-1
kg
m.s-2
𝒑𝒕
= m.𝒗𝒕
=
𝑭𝒆𝒙𝒕
𝒅𝒑
𝒅𝒕
N = kg.m.s-2
s
 6
6
1
/
6
100%