JDICON 1000 Régulateur de process universel

Page 1/13
M. K. JUCHHEIM GmbH & Co
Adresse de livraison : Mackenrodtstraße 14,
36039 Fulda, Allemagne
Adresse postale :
36035 Fulda, Allemagne
Téléphone : +49 661 60 03-0
Télécopieur : +49 661 60 03-6 07
E-Mail : [email protected]
Internet : www.jumo.de
JUMO Régulation S.A.
Actipôle Borny
7 rue des Drapiers
B.P. 45200
57075 Metz - Cedex 3, France
Téléphone : +33 3 87 37 53 00
Télécopieur : +33 3 87 37 89 00
E-Mail : [email protected]
Internet : www.jumo.fr
JUMO AUTOMATION
S.P.R.L. / P.G.M.B.H./ B.V.B.A
Industriestraße 18
4700 Eupen, Belgique
Téléphone : +32 87 59 53 00
Télécopieur : +32 87 74 02 03
E-Mail : [email protected]
Internet : www.jumo.be
Fiche technique 70.3560
06.01/00323418
Synoptique Particularités
!8 Seuils d’alarme
!4 Jeux de paramètres
!Fonction rampe
!Auto-optimisation
!Logique floue
!Régulateur en cascade
!Module mathématique et logique
!Affichage des textes configurable
!Interface (RS485/RS422)
!Interface pour PROFIBUS-DP
!Interface pour bus CAN
!Programme Setup pour PC
!Régulation de la teneur en car-
bone
JDICON 1000
Régulateur de process universel
Boîtier à encastrer suivant DIN 43700
Description sommaire
Le type 703560 est un régulateur compact universel à 1 ou 2 canaux, à programmation libre,
pour différentes grandeurs physiques, avec une face avant de 96 mm ×96 mm.
Le régulateur est équipé de deux indicateurs 7 segments à quatre chiffres, d’un indicateur
7 segments à un chiffre, d’indicateurs de position et d’état et d’un indicateur à matrice de
points, de 16 caractères.
Les six touches de la face avant suffisent pour la commande, le paramétrage et la configuration.
Il peut être utilisé comme régulateur à 2 plages, à 3 plages, à 3 plages pas à pas, proportionnel
ou proportionnel avec positionneur intégré.
Le logiciel du régulateur comporte entre autres une fonction rampe, une commutation du jeu de
paramètres, une auto-optimisation, un module de logique floue et 8 seuils d’alarme.
Les linéarisations des capteurs usuels sont mémorisées ; il est possible de programmer un
tableau spécifique au client.
Un module mathématique et logique peut être livré, en option. Une option supplémentaire per-
met d’utiliser le type 703560 pour réguler la teneur en carbone dans les fours de cémentation
en milieu gazeux. Comme le régulateur est embrochable, il est possible d’ajouter sans pro-
blème des extensions.
L’interface sérielle permet d’intégrer le régulateur à un réseau de données. Le programme
Setup permet de programmer de façon conviviale sur un PC. Un module de relais externe à huit
sorties permet d’augmenter le nombre de sorties.
Type 703560/10-001-1-1-01/00

06.01/00323418
Fiche technique 70.3560JUMO - MESURE ET REGULATION Page 2/13
Auto-optimisation
Le régulateur est équipé de série de l’auto-
optimisation ; elle permet d’adapter le
régulateur à la boucle de régulation sans
posséder des connaissances particulières
en régulation.
L’auto-optimisation analyse la réaction du
système asservi suite à certaines variations
du taux de modulation et calcule les para-
mètres de régulation Xp, Tn, Tv et Cy.
Les paramètres flous Fc1 et Fc2 prennent
une valeur standard après l’auto-
optimisation, c’est-à-dire que la fonction
logique floue est désactivée. Le niveau
Paramétrage permet de consulter et de
modifier tous les paramètres.
Logique floue
En plus de l’auto-optimisation, le logiciel
du régulateur contient également un
module logiciel de logique floue. Ce
module permet d’améliorer le comporte-
ment pilote et le comportement en cas de
perturbation.
Linéarisation
spécifique au client
En plus des linéarisations pour les capteurs
usuels, il est possible de créer deux linéari-
sations spécifiques au client.
La programmation se résume à la saisie
d’un tableau de valeurs dans le programme
Setup.
Module mathématique
et logique
Le module mathématique permet d’établir,
dans une formule mathématique, une rela-
tion entre les consignes, les taux de modu-
lation, les valeurs mesurées sur les entrées
analogiques ainsi que des signaux logi-
ques. Le module logique permet de combi-
ner de façon logique des entrées logiques,
des seuils d’alarme et des contacts de
commande.
Le logiciel Setup permet de saisir deux for-
mules pour chacun des deux modules ; les
résultats des calculs sont délivrés sur les
sorties.
De plus, les formules standard intégrées
permettent de réaliser des régulations de
différence, de rapport et d’humidité.
Affichage de texte
Les fonctions des entrées logiques, des
seuils d’alarme, des sorties logiques du
module logique et des contacts de com-
mande peuvent être documentées avec
des textes spécifiques au client.
De plus, il est possible d’attribuer des
noms aux programmes. Le texte pro-
grammé (max. 16 caractères) est affiché
sur l’indicateur à matrice de points, selon
l’état de la fonction ou la configuration des
indicateurs. Les textes du client et les
noms des programmes sont saisis dans le
logiciel Setup.
Fonction rampe
Cette fonction permet de démarrer le process selon un gradient prédéterminé (rampe
croissante ou décroissante) pour atteindre la consigne. Une LED verte signale que la fonc-
tion rampe est active.
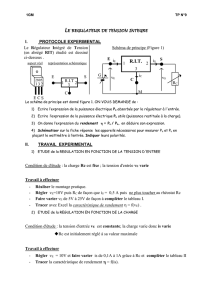
Régulateur proportionnel
avec positionneur intégré pour servomoteur
Fonction
Le régulateur proportionnel (2) avec positionneur intégré (4) pour servomoteur (5) repré-
sente une régulation en cascade. La boucle de régulation en cascade (positionneur) est
optimisée dans le régulateur après saisie du temps de marche de l’organe de positionne-
ment (TT).
La boucle de régulation fermée du positionneur a un gain de 1. Le régulateur proportionnel
délivre le taux de modulation Ys. Le filtre de recopie de l’angle de positionnement (3) est
intégré à l’auto-optimisation et ne peut pas être modifié par l’utilisateur.
Il est possible de régler les structures de régulation P, PI, I, PD ou PID sur le régulateur
proportionnel.
Le paramètre dF de l’auto-optimisation définit la constante de temps du filtre de valeur
réelle (1) et l’utilisateur ne peut pas modifier cette constante.
Avec les moteurs à forte inertie, il est possible d’éviter un “à-coup” de l’organe de posi-
tionnement en augmentant l’écartement des contacts XSh.
Il faut que la recopie de l’angle de positionnement soit connectée.

06.01/00323418
Fiche technique 70.3560JUMO - MESURE ET REGULATION Page 3/13
Logiciel Setup
Le logiciel Setup qui permet de configurer
l’appareil est disponible en français,
anglais et allemand.
Le PC permet de créer des jeux de don-
nées, de les éditer, de les transmettre au
régulateur ou de les consulter dans le régu-
lateur. Les jeux de données sont mémori-
sés et gérés sur le PC.
Interface RS422/RS485
L’interface sérielle sert à communiquer
avec des systèmes maîtres.
On utilise le protocole de transmission
MOD-bus/J-bus.
Bus PROFIBUS-DP/
Bus CAN
L’interface PROFIBUS-DP ou CAN permet
d’intégrer le régulateur à un système à bus
de terrain, conforme à la norme
PROFIBUS-DP/CANopen.
La variante PROFIBUS est conçue spécia-
lement pour la communication entre des
systèmes d’automatisation et des appa-
reils périphériques décentralisés au niveau
du terrain ; sa vitesse est optimisée. La
transmission des données est sérielle et
conforme à la norme RS-485.
L’outil de développement fourni (généra-
teur GSD ; GSD = données de base de
l’appareil) permet de créer un fichier GSD
normalisé en sélectionnant des données
du régulateur ; ce fichier permet d’intégrer
le régulateur au système à bus de terrain.
Régulation en cascade
Pour les tâches de régulation exigeantes, il
est possible de configurer le régulateur
(exécution à 2 canaux) en cascade ou en
cascade auto-correctrice.
Régulation de la teneur
en carbone
Le régulateur peut être utilisé pour réguler
la teneur en carbone dans les fours de
cémentation en milieu gazeux. Un capteur
de dioxyde de zirconium est utilisé pour la
mesure.
Utilisation, paramétrage et configuration
L’utilisation, le réglage des paramètres de
régulation et la configuration du régulateur
sont organisés sur sept niveaux différents
.
Niveau Utilisateur
Ce niveau permet d’afficher différentes gran-
deurs de process (valeurs mesurées sur les
entrées analogiques, durées des program-
mes ...) et d’activer des modes de fonction-
nement.
Niveau Paramétrage
Ce niveau permet de régler les paramètres
du régulation.
Niveau Configuration C1
Ce niveau permet de modifier des réglages
spécifiques au régulateur (type de régula-
teur, seuils d’alarme ...).
Niveau Configuration C2
Ce niveau permet de modifier des réglages
spécifiques au système (interface, indica-
teurs ...).
Niveau Configuration C3
Ce niveau permet d’afficher les options
matérielles et logicielles dont est équipé
l’appareil.
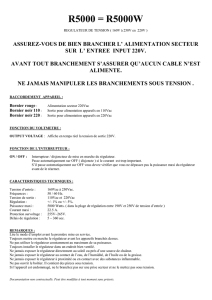
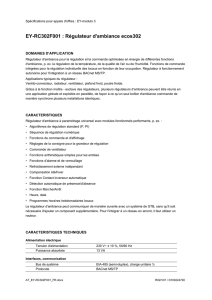
Affichage et commande
(1) Indicateur configurable,
à 7segments
4 digits, 13 mm de haut, rouge
D’usine : valeur réelle
(5) Interface Setup
(2) Indication du canal
1 digit, 7 mm de haut, rouge (6) Indication de l’état
4 LED jaunes
pour indiquer l’état des sorties
2 LED vertes pour signaler les
modes de fonctionnement “mode
manuel” et “fonction rampe”
(3) Indicateur configurable,
à 7segments
4 digits, 10 mm de haut, vert
D’usine : consigne
(7) Unité de base
Possibilité de la modifier avec
les autocollants d’unité fournis
(4) Indicateur configurable,
à matrice de points
16 caractères, 5 mm de haut, vert
(8) Touches

06.01/00323418
Fiche technique 70.3560JUMO - MESURE ET REGULATION Page 4/13
Niveau Paramétrage
Ce tableau contient tous les paramètres et leur description. Selon le type du régulateur, certains paramètres n’existent pas ou n’ont pas
de signification. Pour certaines applications, il est possible de mémoriser quatre jeux de paramètres par régulateur.
Paramètre Affichage Plage de valeur Réglage
standard Signification
Structure de régulation structure 1 P, I, PD, PI, PID PID Il est possible de sélectionner une des structures de
régulation suivante : P, I, PD, PI et PID.
(La structure 2 concerne la deuxième sortie d’un
régulateur à 3plages.)
structure 2 P, I, PD, PI, PID PID
Bande proportionnelle Xp1 0 à9999 digits 0 digit Largeur de la bande proportionnelle.
Xp2 0 à9999 digits 0 digit Si Xp1,2 = 0, la structure de régulation n’est pas
active !
Temps de dérivéeTv10à9999 s 80 s Influence la part différentielle du signal de sortie
du régulateur.
Tv2 0 à9999 s 80 s
Temps d’intégrale Tn1 0 à9999 s 350 s Influence la part intégrale du signal de sortie
du régulateur.
Tn2 0 à9999 s 350 s
Durée de la période Cy1 0 à9999 s 20 s Pour une sortie à relais, la durée du cycle de commu-
tation doit être choisie de telle sorte que d’une part
l’apport d’énergie au process s’effectue de façon
presque continue et que d’autre part les organes de
commutation ne soient pas surchargés.
Cy2 0 à9999 s 20 s
Écartement des contacts Xsh 0 à999 digits 0 digit Écart entre les deux contacts du régulateur à
3plages, du régulateur à 3 plages pas à pas et du
régulateur proportionnel avec positionneur intégré.
Hystérésis Xd1 0 à999 digits 1 digit Hystérésis pour le régulateur tout ou rien avec Xp = 0.
Xd2 0 à999 digits 1 digit
Temps de marche de
l’organe de positionnement TT 5 à3000 s 60 s Temps de marche de la vanne de régulation pour le
régulateur à 3plages pas à pas et le régulateur pro-
portionnel avec positionneur intégré.
Point de fonctionnement Y0 −100 à+100% 0% Taux de modulation pour les régulateurs P et PD
(si x = w alors y = Y0).
Limitation du taux
de modulation Y1 0 à100% 100% Limite supérieure du taux de modulation.
Y2 −100 à+100% −100% Limite inférieure du taux de modulation.
Durée minimale
d’enclenchement des relais Tk1 0 à60 s 0 s Limitation de la fréquence de commutation
pour les sorties à relais.
Tk2 0 à60 s 0 s
Intensité floue Fc1 0 à100% 0% Intensité du signal flou ajouté à la sortie du régulateur
pour améliorer la qualité de la régulation.
Réglage flou
des paramètres Fc2 0 à100% 30% Action sur les paramètres de régulation pour amélio-
rer la qualité de la régulation, lorsque le module flou
est actif.

06.01/00323418
Fiche technique 70.3560JUMO - MESURE ET REGULATION Page 5/13
Niveau Configuration C1
Régulateur !Type de régulateurs 1 + 2
Constante de temps pour
la surveillance de la
boucle d’asservissement
régulateurs 1 + 2
Seuils d’alarme !Seuils d’alarme 1 à8!Fonction
Mode de fonctionnement
Hystérésis
Valeur limite
Fonction en cas de dépassement
sup. ou inf. de l’étendue
de mesure
Entrées
[régulateur
et seuils d’alarme (lk)]
!Fonction
Type
!
!
Entrées des régulateurs 1 + 2
Entrées des seuils d’alarme 1 à8
Entrées analogiques 1 à4
!
!
!
Valeur réelle
Consigne externe
Recopie de l’angle de positionnement
Grandeur perturbatrice additive
Grandeur perturbatrice multiplicative
Valeur réelle du seuil d’alarme
Consigne du seuil d’alarme
Capteur de mesure
Linéarisation
Correction de la valeur réelle
Température de compensation
de soudure froide constante
Température de compensation
de soudure froide externe
Surveillance du courant de chauffage
Début d’affichage
Fin d’affichage
Début de l’étendue de mesure
Fin de l’étendue de mesure
Constante de temps du filtre
Sorties !Sorties 1 à4!Fonction
Signal de sortie
Point de référence
Valeur finale
Signal de sortie en cas de
dépassement sup. ou inf.
de l’étendue de mesure
Module de relais
externe
!Sorties externes 1 à8!Fonction
Fonction en cas de dépassement
sup. ou inf. de l’étendue de
mesure
Fonctions spéciales !Rampe
Taux de modulation
manuel
Mode manuel
Auto-optimisation
Limites de la consigne
Module mathématique
et logique
!
!
!
!
!
!
!
Rampe des régulateurs 1 + 2
Taux de modulation manuel
des régulateurs 1 + 2
Mode manuel
des régulateurs 1 + 2
Auto-optimisation
des régulateurs 1 + 2
Limites de la consigne
des régulateurs 1 + 2
Mathématique 1 + 2
Logique 1 + 2
!
!
!
Fonction
Pente
Unité
Début de la consigne
Fin de la consigne
Fonction
Variable a
Variable b
Début de l’étendue de mesure
Fin de l’étendue de mesure
 6
7
8
9
10
11
12
13
6
7
8
9
10
11
12
13
1
/
13
100%