Recherche Opérationnelle 1A Théorie des graphes


Plus courts chemins
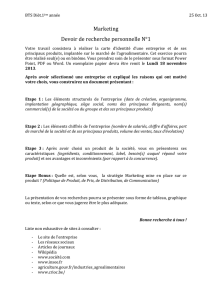
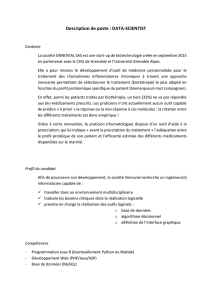
Probl`eme
Arriver d’un point `a un autre point le plus vite possible.
Mod´elisation
1r´eseau : (G,c) o`u
1G= (V,A) un graphe orient´e,
2c:A→Run coˆut sur les arcs.
2distance :dist(G,c)(s,t)= coˆut minimum d’un (s,t)-chemin.
s
1
2
3
4
5 6
⑦
❃
✲
✲
❄s
✲
✻✸
❄
q
✶
1
3
2
-2
1
4
1
1
3
3
9
4
Z. Szigeti (G-SCOP, Grenoble) RO 1A 1 / 13

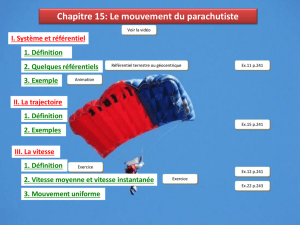
Probl`eme de circuit absorbant
D´efinition
Circuit absorbant : un circuit Cdont le coˆut total est n´egatif, c(C)<0.
1 1
-1 -1
1
C
Remarques
1avec circuit absorbant :
1chemin : pas de solution optimale,
2chemin ´el´ementaire : probl`eme (NP-)difficile.
2sans circuit absorbant :
1les deux probl`emes co¨ıncident,
2on peut les r´esoudre.
Z. Szigeti (G-SCOP, Grenoble) RO 1A 2 / 13

Chemins optimaux + Cas sp´eciaux
Remarque
On calcule le plus court chemin de s `a tous les sommets.
Propri´et´e des sous-chemins optimaux
Tout sous-chemin d’un plus court chemin est un plus court chemin.
Algorithmes pour les cas sp´eciaux:
1pas de circuit : algorithme de Bellman,
2pas de coˆut n´egatif : algorithme de Dijkstra,
3pas de circuit absorbant : algorithme de Bellman-Ford.
Z. Szigeti (G-SCOP, Grenoble) RO 1A 3 / 13

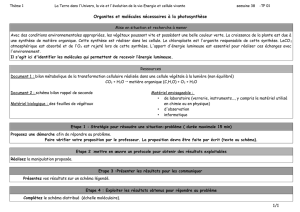
Arborescences
D´efinitions
1racine d’un graphe orient´e G: un sommet stel que dans Gchaque
sommet peut ˆetre atteint par un chemin `a partir de s.
2s-arborescence de G: un graphe partiel Fde Gtel que
1sans cycle et sracine de F,⇐⇒
2sans circuit et d−
F(v) = 1 ∀v∈V\s.⇐⇒
3il existe un et un seul chemin dans Fde s`a chaque sommet.
Th´eor`eme
sest une racine de G⇐⇒ Gposs`ede une s-arborescence.
s
31
2
D´emonstration
1suffisance : par d´efinition.
2n´ecessit´e : l’algorithme Marquage fournit une s-arborescence.
Z. Szigeti (G-SCOP, Grenoble) RO 1A 4 / 13
 6
7
8
9
10
11
12
13
14
6
7
8
9
10
11
12
13
14
1
/
14
100%