Application - chireux.fr

CD:\SE\Cours\Chap3a Marc Correvon
Systèmes électroniques
___________
Chapitre 3a
APPLICATION :
LE RÉGULATEUR DE TENSION
Dimensionnement
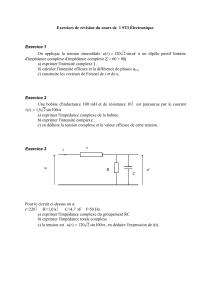
R
i
R
0
i
S
u
i
Ri
i
i
0
g
m
R
L
R
βi
R
β0
i
i
u
β0
u
β
i
i
βi
i
β0
u
0
g
m
u
βi
R
S
R


TABLE DES MATIERES
PAGE
1. RÉGULATEUR LINÉAIRE DE TENSION...............................................................................................................1
1.1 PRÉPARATION AU LABORATOIRE...............................................................................................................................1
1.1.1 Dimensionnement d'un régulateur linéaire de tension...........................................................................1
1.1.2 Travail à réaliser ....................................................................................................................................2

SYSTEMES ELECTRONIQUES : LABORATOIRE Page 1
ALIMENTATIONS STABILITEES : Chapitre 3
CD:\SE\Cours\Chap3a
1. RÉGULATEUR LINÉAIRE DE TENSION.
1.1 PRÉPARATION AU LABORATOIRE
1.1.1 Dimensionnement d'un régulateur linéaire de tension
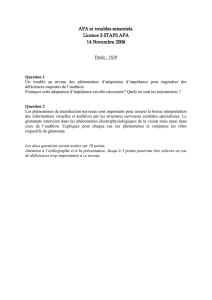
Soit le régulateur linéaire illustré à la Figure 1-1 présentant les caractéristiques suivantes
Tension de sortie nominale : U0[nom] =5V
Tension d'entrée nominale : Uin[nom] =15V
Tension d'entrée minimale Uin[min] =12V
Tension d'entrée maximale Uin[max] =18V
Courant de sortie nominal I0[nom] = 0.5A
Courant de sortie maximum @U0=5V : I0[max] =1A
±20%
Courant de sortie maximum @U0=0V :
I0CC : courant de court-circuit
(valeur minimale à déterminer)
Tension collecteur-émetteur minimale du
transistor ballast (Q13)
: UCE(Q13)[min] = 1V
Dz1 Dz2
D1
R1
R2R3
Q1Q2
Q3
R4
R5
Q4
Q13
Q11
Dz
Q8Q9
Q7
Q6
R6
Q5R11
R12
R9
R10
Q10
RLIM
R13
Q12
Q14
Vin(+)
0V
V0ut(+)
0V
JMP2
RLIM1
R7R8
JMP1
C2
C1C3
JMP3
S1 S2 S3 S4
S5 S6
Figure 1-1: Régulateur linéaire de tension

SYSTEMES ELECTRONIQUES : LABORATOIRE Page 2
ALIMENTATIONS STABILITEES : Chapitre 3
CD:\SE\Cours\Chap3a
Les semiconducteurs à disposition sont :
Pour les transistors
Modèle Type UCEmax [V] ICmax [mA] Pmax [W] βtyp Ua [V]
PN100A NPN 45 500 0.65 150 120
PN200A PNP 45 500 0.65 150 120
2N5191 NPN 60 4000 40 50 100
Pour les diodes Zeners
Modèle UZnom [V] @ IZtest [mA] IZtest [mA] P [mW]
BZX55C4V7 4.7V±10% 5mA 500
BZX55C5V6 5.6±10% 5mA 500
BZX55C2V7 2.7±10% 5mA 500
1.1.2 Travail à réaliser
On demande
1. D'expliquer le rôle de chaque bloc (S1, S2, S3, S4, S5, S6).
2. De déterminer les courants de polarisation (cas nominal : Uin=15V, U0=5V) de chaque
bloc et donc les résistances R1 à R8 et R11, R12, R13 en expliquant brièvement vos choix.
3. De calculer le niveau DC (point de repos) en chaque nœud du circuit.
4. De calculer les résistances du bloc S6 assurant le respect des spécifications liées à la
limitation du courant de sortie.
5. De calculer la puissance dissipée dans le transistor Q13 (pire cas) lorsque i0=I0[max], pour le
cas de la limitation sans repliement.
De calculer la puissance dissipée dans le transistor Q13 (pire cas) lorsque i0=I0[max], pour le
cas de la limitation avec repliement.
De calculer la puissance dans le transistor Q13 (pire cas) lors d'un court-circuit i0=I0[CC].
sur la sortie, pour le cas de la limitation avec repliement.
6. De calculer l'impédance de sortie pour le point de fonctionnement nominal
(I0=0.5A ⇒ RL=10Ω).
7. De calculer, à partir de l'impédance de sortie, le facteur de régulation de charge
(load regulation) :
][
][00
][
0
][00
0
0
0
nominin
nom
nominin
UU
nomF
II
UUC U
IR
U
u
F
=
≤≤
=
⋅
=
∆
=
8. De calculer le facteur de régulation de ligne :
][00
[max][min]
][0
0
nom
ininin
II
UUU
nom
LU
u
F
=
≤≤
∆
=
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
1
/
22
100%