Moteurs à courant continu – Moteurs asynchrones

Enveloppe du Bâtiment Page 1
Chapitre 17 Sciences Physiques - BTS
Moteurs à courant continu – Moteurs asynchrones
1 Loi de Laplace
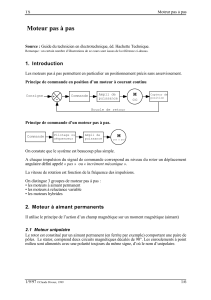
1.1 Etude expérimentale
Le conducteur est parcouru par un courant
continu ; il est placé dans un champ
magnétique. Le conducteur se déplace sur le
rail.
1.2 Enoncé
Tout conducteur parcouru par un courant d’intensité I, placé
dans un champ magnétique d’induction , est soumis à une
force électromagnétique appelée force de Laplace.
1.3 Caractéristiques
Le sens de la force est donné par la règle des 3 doigts de la main
droite : majeur = magnétisme / index = intensité / pouce = force
L’intensité de la force de Laplace est donnée par la formule :
Le champ magnétique s’exprime en tesla.
2 Courants de Foucault
Lorsqu’un disque métallique se déplace dans un champ magnétique, il se
produit dans les masses métalliques, des courants induits appelés courants
de Foucault. D’après la loi de Lenz, l’effet de ces courants s’oppose à la
cause qui leur donne naissance, c'est-à-dire à la rotation : des forces de
Laplace apparaissent et provoquent le freinage.
Utilisation : freinage des bus et des poids lourds – système Telma

Enveloppe du Bâtiment Page 2
3 Moteur à courant continu
Un moteur à courant continu comporte trois organes
essentiels :
Le stator
Le rotor
Le collecteur
3.1 Le stator ou inducteur
Le stator est constitué d’un électroaimant à deux
pôles ; la carcasse ferme le circuit magnétique. Dans certain cas, le stator est un aimant permanent.
3.2 Le rotor ou induit
L’induit est constitué d’un cylindre présentant des encoches dans lesquelles sont logés les
conducteurs droits.

Enveloppe du Bâtiment Page 3
Le collecteur est constitué de lames de cuivre isolées entre elles. Deux frotteurs appelés « balais » ou
« charbons » appliqués sur le collecteur assurent l’alimentation des conducteurs induits.
3.3 Fonctionnement
L’induit est placé dans le champ magnétique créé par l’inducteur. Les
conducteurs droits situés dans le champ d’induction sont soumis aux
forces de Laplace et . Ces actions conjuguées provoquent la
rotation du moteur.
Lorsqu’un conducteur traverse la ligne neutre, la force à laquelle il est
soumis doit changer de sens de façon à ne pas interrompre la rotation ;
pour cela, le sens du courant dans le conducteur doit lui-même
changer : c’est le rôle du collecteur.
3.4 Loi d’Ohm. Force contre-électromotrice
La loi d’Ohm est donnée par la relation :
La f.c.é.m. est donnée par la relation :
Schéma équivalent de l’induit

Enveloppe du Bâtiment Page 4
3.5 Puissances
Puissance électrique absorbée :
Puissance électromagnétique :
Pertes par effet Joule :
3.6 Problème posé par le démarrage
D’après les relations précédentes :
correspond au fonctionnement normal du moteur : c’est l’intensité nominale. Si le flux est constant,
l’intensité ne dépend donc que de la fréquence de rotation . Mais à l’instant du démarrage, ,
donc : le rotor se conduit comme un résistor et l’intensité est maximale.
Afin de limiter les surintensités à l’instant du démarrage, on place en série avec l’induit un rhéostat
de démarrage de résistance :
4 Moteur asynchrone triphasé
4.1 Définitions
Une machine synchrone est une machine électrique :
produisant un courant électrique dont la fréquence est déterminée par la vitesse de rotation
de la machine : fonctionnement « générateur » (alternateur) ;
absorbant un courant électrique dont la fréquence détermine la vitesse de rotation de la
machine : fonctionnement « moteur ».
La machine asynchrone, connue également sous le terme " anglo-saxon " de machine à induction,
est une machine à courant alternatif sans connexion entre le stator et le rotor. Le terme asynchrone
provient du fait que la vitesse de ces machines n'est pas forcément proportionnelle à la fréquence
des courants qui la traversent.
en tr/s
en N.m
en W

Enveloppe du Bâtiment Page 5
La machine asynchrone a longtemps été fortement concurrencée par la machine synchrone dans les
domaines de forte puissance, jusqu'à l'avènement de l'électronique de puissance. On les retrouve
aujourd'hui dans de nombreuses applications, notamment dans le transport (métro, trains,
propulsion des navires), de l'industrie (machine-outil), dans l'électroménager. Elles étaient à l'origine
uniquement utilisées en moteur mais, toujours grâce à l'électronique de puissance, sont de plus en
plus souvent utilisées en génératrice. C'est par exemple le cas dans les éoliennes.
Pour fonctionner en courant monophasé, ces machines nécessitent un système de démarrage. Pour
les applications de puissance, au-delà de quelques kilowatts, les moteurs asynchrones sont
uniquement alimentés par des systèmes de courants triphasés
4.2 Le stator
Le stator est constitué de la carcasse, sur laquelle
sont montés les bobinages formant un ensemble de
trois enroulements correspondants aux trois phases
du réseau d’alimentation.
4.3 Le rotor
Le rotor est constitué de tôles d’acier empilées et formant un
cylindre. Il existe plusieurs types de rotors, parmi lequel le rotor
dit « à cage d’écureuil » comprenant des conducteurs
sensiblement parallèles à son axe.
4.4 Champ magnétique tournant
DU point de vue électrique, le stator est équivalent à
un système de trois bobines identiques dont les axes
forment des angles de 120°. Le stator, alimenté en
courant triphasé, crée un champ magnétique
tournant :
Chaque bobine crée un champ magnétique variable
proportionnel au courant qui la traverse et dont le
sens est lié à celui du courant dans la bobine. Si on
construit le vecteur de l’induction résultante à
chaque instant t , on obtient un vecteur de norme
constante qui tourne autour du centre des 3 bobines.
Remarque : L’intensité de l’induction magnétique au voisinage du centre de la bobine est
donnée par la relation :
N : nombre de spires
l
: longueur du solénoïde
I
: intensité du courant
 6
7
6
7
1
/
7
100%