Travaux pratiques – prépa. agreg. - Département de physique

Département de physique
Travaux pratiques – prépa. agreg.
Sommaire
Electronique :
- Amplificateurs et oscillateurs
- Modulation et démodulation d’amplitude
- Modulation et démodulation de fréquence
Instrumentation :
- Acquisition de données
Electricité de puissance :
- Mesure de puissance.
- Transformateur.
- Convertisseurs électrique-électrique.
- Machine à courant continu.
Asservissement:
- Asservissement de vitesse d’un moteur et contrôle du flux lumineux émis par une LED

1
ENS de Cachan – TP de préparation à l’agrégation de physique
T.P. sur l'Amplificateur Opérationnel
Dans ce TP, nous allons tout d'abord nous intéresser aux limitations dynamiques de fonctionnement de ce
composant. Nous distinguerons un effet linéaire (comportement passe bas) d’un effet non linéaire (slew rate).
Dans une seconde partie, nous nous intéresserons aux paramètres statiques du circuits (courants de
polarisation et tension de décalage).
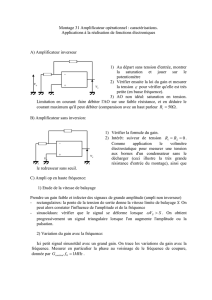
I. Modélisation de l'amplificateur opérationnel.
L'amplificateur opérationnel est un composant actif (il est réalisé à partir de transistors). Pour fonctionner, il
doit donc être polarisé (entre –15V et +15V pour le composant que nous allons étudier dans le TP). Suivant le
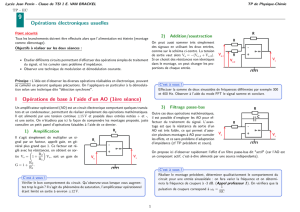
montage réalisé, il peut fonctionner en amplificateur (il est alors polarisé en zone linéaire) ou en comparateur
(dans ce cas, il va fonctionner en passant d'un zone de saturation à l'autre. La caractéristique présentée sur la
figure suivante dépend de la fréquence (le brochage est donné en annexe).
Nous verrons par la suite que la pente de la zone linéaire dépend notablement de la fréquence de travail. La
caractéristique peut même devenir non-linéaire pour des évolutions trop rapides de la tension de sortie.
rq : l’amplificateur opérationnel peut fonctionner en comparateur lorsqu’on l’insère dans un circuit à
rétroaction positive. Néanmoins, ce fonctionnement demande des commutations rapides entre deux niveaux de
tensions (écart de 30V dans notre cas). Quand on a besoin d’un comparateur performant, on utilisera de
préférence un composant explicitement appelé « comparateur » et non un amplificateur opérationnel…
I.1. Modélisation dynamique: (on néglige les courants de défaut ou la tension de décalage).
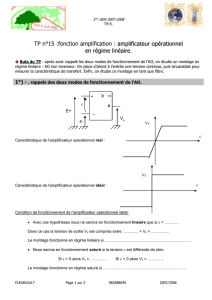
I.1.1. L'amplificateur et le gain en boucle ouverte.
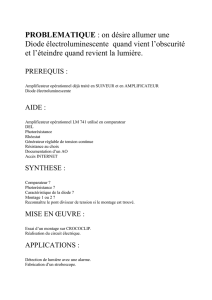
Dans la mesure où l'amplificateur opérationnel est chargé de réaliser une amplification de tension, il peut être
modélisé comme tel, en introduisant une résistance d'entrée Re, une résistance de sortie Rs et un gain en tension
A, ce qui nous ramène au schéma de la figure suivante:
En première approximation, on peut considérer que le gain en tension de l'amplificateur opérationnel
correspond à un comportement de filtre passe-bas du premier ordre. Ce gain, appelé également gain en boucle
ouverte, peut donc se mettre sous la forme suivante:
0
0
ff
.j1
A
A
+
=
Dans ce TP, nous allons essentiellement étudier un composant particulier, le TL081. Il s'agit d'un
amplificateur bon marché, réalisé à partir de transistors MOS. Le procédé de fabrication conduit à une dispersion
importante sur les valeurs de A0 et f0. On peut néanmoins citer les ordres de grandeur suivants:
5
010A ≈ et Hz10f0
≈
Il faut noter que l'impédance d'entrée de l'AOP est très grande (supérieure, voir très supérieure au MΩ), ce
qui fait que l'on peut considérer qu'il ne rentre aucun courant sur les entrées + et - de l'AOP .
L'impédance de sortie est faible, ce qui est nécessaire pour que l'AOP soit un bon amplificateur de tension (la
tension de sortie doit varier le moins possible avec le courant de sortie, ce qui signifie que la chute de tension
dans la résistance de sortie est négligeable devant la tension de sortie).
rq : le schéma équivalent de l’amplificateur s’applique aussi bien au composant seul, qu’aux circuits
complets avec composant actif et résistances, comme l’amplificateur inverseur par exemple. Les caractéristiques
du schéma changent évidemment lorsque l’on passe de l’un à l’autre…
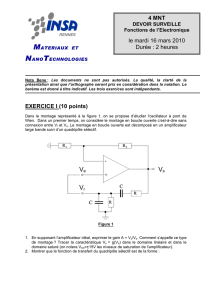
I.1.2.L'amplificateur opérationnel en boucle fermée: exemple du montage non inverseur.
Dans la plupart des cas, l'amplificateur opérationnel est utilisé en boucle fermée (système rétroactionné).
Nous allons étudier le montage suivant :

2
Si on remplace l'AOP par son schéma équivalent amplificateur, dans le montage de la figure précédente, et si
on suppose que sa résistance d'entrée est infinie et que sa résistance de sortie est nulle, alors on peut se ramener
au schéma bloc de la figure suivante:
La fonction de transfert en boucle fermée de ce montage est donnée par la formule suivante:
'
0
'0
21
1
00
21
1
0
0
21
1
0
0
0
0
21
1
e
s
f
f
.j1
A
)
RR
R
.A1.(f
f
.j1
RR
R
.A1
A
RR
R
.
ff
.j1
A
1
ff
.j1
A
RR
R
.A1
A
V
V
+
=
+
+
+
+
+
=
+
+
+
+
=
+
+
=
On constate que le gain statique A0' de ce montage, si on suppose que A0 est très grand, est conforme au
résultat trouvé usuellement quand on suppose que le gain est infini, à savoir
1
2
'0R
R
1A +=
On constate également que le produit gain-bande est constant et que
00
'
0
'0f.Af.A =
Le produit gain bande en boucle ouverte est donc conservé lorsque l'on travaille en boucle fermée. Si on
cherche à réaliser un montage non inverseur à fort gain statique, la bande passante du montage sera faible. Si
on cherche, en revanche, une grande bande passante, on devra travailler avec des étages à faible gain (pour
obtenir un fort gain avec une grande bande passante, on peut mettre plusieurs étages identiques en
cascade…mais l’ordre augmente).
I.1.3. Vitesse de variation limite de Vs : "slew rate".
De par sa conception, l'AOP ne peut pas fournir une tension de sortie dont la pente dépasse, en valeur
absolue, une valeur limite σ, appelée "slew rate".
max
s
dt
dV ⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
=σ
Cet effet non linéaire se manifeste, par exemple, lorsque l'on travaille avec des sinusoïdes de forte amplitude
à haute fréquence (la pente maximale d'une sinusoïde d'amplitude S et de pulsation ω est S.ω). Il est également
particulièrement pénalisant lorsque l'on cherche à faire fonctionner l'AOP en comparateur, ce qui demande
d'effectuer des commutations rapides entre +Vcc et -Vcc.
I.2. Prise en compte des imperfections statiques. (ces imperfections sont très faibles sur les AOP
modernes, mais elles se manifestent tout de même de façon nuisible dans le cas de certains montages, et
notamment pour l'intégrateur). Lorsque l'on s'intéresse à ces défauts, on considère souvent le gain infini, afin de
simplifier l'étude.
I.2.1. Modèle.
Le fait que l'AOP soit un composant actif, réalisé à base de transistors, impose l'utilisation de sources de
polarisations. Ces sources sont à l'origine des défauts dont nous allons parler maintenant.
Pour les prendre en compte, l'AOP va être représenté de la façon suivante:
Le constructeur définit souvent les paramètres suivants :

3
Le courant de polarisation. 2II
Ip−+
+
= et le courant de décalage −+ −= IIId
Dans la suite, on verra qu’il est souvent possible de compenser l’effet parasite de Ip sur la tension de sortie de
l’AOP en ajoutant des résistances judicieusement choisies (Cf I.2.3.).
I.2.2. Application à un exemple: dérive d'un intégrateur.
On peut essayer d'appliquer le schéma de la figure 5 au montage intégrateur ce qui conduit à la figure
suivante
Supposons que l'entrée ve soit mise à la masse. On doit avoir une sortie nulle si on néglige les courants de
défaut. Dans la pratique, on observe que la sortie passe très rapidement en saturation.
A partir du schéma de la figure 6, on peut écrire que la tension aux bornes de la capacité est donnée par
sdc vVv
−
−
=
Le courant dans la capacité est donné par
−
−= I
R
V
id
c
Comme on a
dt
dv
.Ci c
c=
Si on suppose que vc est nulle à l'instant initial, on obtient
t.
C
I
R
V
)t(v
d
c
⎟
⎠
⎞
⎜
⎝
⎛−
=
− soit t.
C
I
R
V
)t(v)t(v
d
cs
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛−
−=−≈
−
Malgré l'absence de tension en entrée, la tension vc va donc évoluer linéairement (de façon croissante ou
décroissante suivant la valeur des différents termes), jusqu'à ce que vs atteigne Vcc ou –Vcc suivant les cas.
En travaillant avec des valeurs de R judicieusement choisies, on peut estimer I- et Vd en mesurant la pente de
la droite décrite par vs(t).
I.2.3. Méthode de mesure des différents défauts statiques ; limitation des effets.
On considère le montage suivant
Dans le cas d’un AOP sans le moindre défaut, il s’agirait d’un montage amplificateur inverseur et la
résistance R3 serait inutile. Nous allons voir qu’en donnant à R3 une valeur particulière (dépendant de R1 et R2),
on peut limiter l’incidence de certains défauts statiques. Ce type de montage permet par ailleurs, en prenant
différentes associations de valeurs de résistance de se ramener à la valeur des défauts statiques.
On a les relations suivantes
++ −= I.RV 3
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛−+
+
=−
I
R
v
R
v
.
RR R.R
V2
s
1
e
21
21
d
VVV =−
−
−+ =VV
On pose

4
2II
Ip−+ +
=
+− −= IIId
D’où
d
21
21
3
2
p
21
21
32d
1
21
e
1
2
sI.
R.R RR
.R1.
2
R
I.
R.R RR
.R1.RV.
RRR
v
R
R
v⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛+
++
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛+
−+
+
−−=
Le premier terme correspond à la réponse du circuit parfait, le second indique l’incidence de la tension de
décalage. On constate qu’il existe une valeur de R3 qui permet d’annuler l’incidence de Ip. C’est tout l’intérêt de
placer une résistance R3 (si on prend R3 nulle, l’incidence des courants de polarisation est plus importante…).
Pour estimer Vd, Ip et Id, on peut procéder de la façon suivante :
- on force ve à 0 (mise à la masse).
- on s’impose R3 pour éliminer le rôle de Ip et on choisit judicieusement deux couples de valeur pour R1 et
R2 (ce qui impose de changer R3 à chaque fois). On s’impose R2=100.R1 pour avoir une valeur de vs à
mesurer suffisante… On a alors
d2d
1
2
sI.RV.
R
R
v+−=
2 équations et deux inconnues… on trouve Vd et Id…
- Pour trouver Ip, on s’impose R3 nulle et on mesure vs (attention aux ordres de grandeur pour choisir les
autres composants…).
II. Travail expérimental:
II.1 Etude de quelques caractéristiques générales d’un amplificateur linéaire.
Dans cette partie, on va étudier deux montages classiques permettant d'amplifier un signal, l'un ayant un gain
positif (montage non inverseur), l'autre ayant un gain négatif (montage inverseur).
II.1.1. Estimation des impédances d’entrée et de sortie d’un circuit amplificateur de tension.
On va étudier le cas particulier d’un amplificateur inverseur et on interprétera les résultats obtenus (validité,
conséquence dans l’emploi de l’amplificateur…). On utilisera un TL081.
II.1.1.1. Impédance d’entrée.
On réalise un montage inverseur avec R1 = 330 kΩ et R2 = 330 kΩ. La sortie est laissée à vide. Quel est le
résultat attendu ?
- Mesurer l’impédance d’entrée du circuit en utilisant une résistance R variable (prendre 470kΩ). On
mesurera les tensions continues V et Ve à l’oscilloscope (utilisation de lignes BNC classiques). Une fois
la valeur du potentiomètre correctement accordée, on mesurera la valeur de résistance atteinte au
multimètre (retirer ce dernier du circuit ! ! ! !)..
- Reprendre la même expérience avec un amplificateur non inverseur (on en discute sans le faire). Quel
résultat peut-on trouver avec un TL081. Cette valeur est-elle mesurable ? Si on réalise le montage avec
un 741 le résultat va-t-il changer notablement ? Quel sera son ordre de grandeur ? Quelles précautions
doit-on prendre si on essaie la mesure (penser à l’incidence de l’impédance d’entrée d’un oscilloscope ou
d’un multimètre…). Réaliser cette mesure si on a le temps… Pour visualiser les tensions à
l’oscilloscope, on va utiliser des sondes de tension qui augmentent l’impédance présentée par la chaîne
de mesure.
II.1.1.2. Impédance de sortie (on en discute sans le faire…).
On ne travaillera avec un TL081 sur un amplificateur (inverseur ou non inverseur au choix). On applique la
procédure détaillée en cours avec un potentiomètre Rc de 10Ω. On travaille avec une tension d’entrée
suffisamment faible pour ne pas faire saturer l’amplificateur en courant. Conclure sur le résultat obtenu et sur le
type de charge utilisable avec ce type d’amplificateur.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
1
/
71
100%