Optique géometrique.

1
TRAVAUX PRATIQUES D’OPTIQUE GEOMETRIQUE
I. PRÉSENTATION
La formation dispensée en TP se donne pour but un bon niveau expérimental qui valide
et enrichit le niveau de connaissances théoriques du cours, au travers d'un savoir faire
développant l’initiative et la rigueur et tendant vers l’autonomie.
Les TP, sont une occasion où une initiative plus grande est laissée aux étudiants avec, par
exemple, la rédaction d’un compte rendu lors de la séance. . Il s’agit de TP tournants réalisés en
binômes
II. OBJECTIFS
Permettre à l’élève de bien assimiler les acquis théoriques, et de faire naître chez lui la
curiosité et l’initiative.
Exécuter un protocole expérimental.
L’ensemble des travaux pratiques tournent autour des notions déjà vues en cours telles
que :
- lois de l’optique géométrique : propagation de la lumière ; réflexion et réfraction.
- les lentilles minces : Constitution ; schématisation ; stigmatisme et conditions de
Gauss ; centre optique et foyers ; distance.
- constructions géométriques : rayons utiles ; image ; faisceau.
- relations de conjugaison : Newton ; Descartes ; grandissement.
- collimateur ; lunette ; goniomètre.
III. SAVOIR FAIRE ESCOMPTE
- Utilisation des appareils usuels : sources, lentilles, lunettes, goniomètre, techniques de
projection des images.
- Mesure des distances focales par diverses méthodes.
- Mesure des indices, des longueurs d’onde, on relève des spectres, on vérifie les lois du
prisme.
- Evaluation des incertitudes, comparaison des méthodes, rédaction d’un compte
rendu.
IV. PRESENTATION DES RESULTATS
Les résultats seront présentés dans un rapport, rédigé durant les séances de TP.
- Tout rapport écrit - sur des feuilles "à part" - doit pouvoir être lu et compris par une
personne qui n'a pas fait l'expérience et qui désire la réaliser.
- Ce rapport doit contenir :
→ Une introduction, qui met en évidence le (ou les) but(s) de l'expérience ;
→ Un résumé rédigé de l'expérience ;

2
→ Des éléments de théorie : dans cette partie, les lois et les relations entre les
grandeurs mesurées et les grandeurs à déterminer doivent être clairement formulées;
les démonstrations des formules imprimées sur le protocole doivent être effectuées ;
→ Les conditions expérimentales : cette partie comprend la liste complète du matériel
utilisé (appareils, instruments de mesure, etc.) et un (ou des) schéma(s) explicatif(s) ;
→ Les tableaux complets des résultats de mesure, qui doivent contenir toutes les
valeurs mesurées, les moyennes éventuelles et les incertitudes correspondantes ;
→ Les graphiques demandés ;
→ Les résultats de l'expérience: il s'agit des résultats numériques avec leur précision,
ce qui nécessite un calcul d'erreur et un calcul d'incertitude ;
→ Les commentaires et les remarques générales, discussion des courbes obtenues ;
→ Une conclusion

3
CALCUL D’INCERTITUDE
Il est attendu en TP que vous sachiez faire un calcul d'incertitude complet (incertitude de
mesure due à l'appareil, erreur de lecture sur une règle, erreur de digit sur un appareil
numérique, erreur systématique, incertitude de réglage, …). Toute grandeur mesurée doit être
comparée à une grandeur attendue (théorique ou tabulée) aux incertitudes de mesure près.
1) Erreur, incertitude absolue et incertitude relative :
Erreur = valeur mesurée (X) - valeur vraie (Xvraie).
Incertitude absolue = ΔX (toujours positif) telle que : la valeur mesurée X a de grandes
chances de différer de la valeur vraie Xvraie de moins de ΔX : Xvraie - ΔX ≤ X ≤ Xvraie + ΔX, ou
encore : Xvraie = X ± ΔX (la valeur mesurée a 2 chances sur 3 d’être dans cet intervalle).
Incertitude relative = ∆X/X (positive, sans unité, souvent exprimée en %).
On distingue deux types de sources d’erreur :
Erreur aléatoire : son influence peut être diminuée en effectuant une série de N mesures et en
moyennant le résultat (l’incertitude diminue alors en 1/√N).
Erreur systématique = erreur reproductible, sans caractère aléatoire. Elle ne peut être
réduite par l’acquisition d’un grand nombre de mesures. Cette erreur peut être estimée. Son
signe (positif ou négatif) est souvent connu, car on sait en général si on surestime ou sous-
estime la valeur par la mesure.
2) Calculs d'incertitude
Principe : Dans la plupart des cas, la mesure d'une grandeur ne s'effectue pas par
comparaison directe avec un étalon de mesure mais par la mesure d'autres grandeurs
physiques intermédiaires x,y,z,u,v indépendantes : G = G(x,y,z,u,v...)
Connaissant les incertitudes de mesure sur x, y, z, u, v, on doit déterminer les incertitudes
absolue ΔG et relative ΔG/G. On effectue le calcul par la méthode mathématique des
différentielles :
Par définition, la différentielle totale de G est :
G G G G G
G dx dy dz du dv
x y z u v
On effectue une majoration (on se place dans le cas le plus défavorable) en prenant la valeur
absolue de chaque terme :
G G G G G
G x y z u v
x y z u v
3) Théorèmes élémentaires :
- Somme ou différence G = u + v ou G = u – v :
ΔG = Δu + Δv : on somme les incertitudes absolues
- Produit ou quotient : G = u .v ou G = u /v, en différentiant ln G (le calcul vu en 1ière
Année), on obtient :
dG/G = du/u + dv/v
En passant à la variation (d
)
G u v
G u v

4
Généralisation : de la même manière, on montre que : Si G = A.u + B.v (A et B sont des
constantes sans incertitude), alors :
G = A
u +B
v
Si G=A.uB.vC, ( A, B, C sont des constantes), alors
G u v
BC
G u v
Remarque : Quand on somme les incertitudes, on se place dans le cas le plus défavorable : on
tient compte du cas (possible mais très peu probable), où toutes les erreurs sont maximales et
vont dans le même sens, donc s’ajoutent. Ceci conduit à une surestimation de l’incertitude.
4) Méthodes de calcul dans des cas plus complexes :
- Exemple 1 :
( , , , ) ux
G f x y z u xy zu
.
Ici , la fonction G fait intervenir à la fois des sommes et des produits. Donc on ne peut utiliser
les théorèmes élémentaires vus ci-dessus, il faut différencier :
étape 1 : on différencie la fonction G :
dG = ydx+xdy +du/z – udz/z²- dx/u+xdu/u²
étape 2 : on regroupe les termes (en oubliant cette étape, on peut éventuellement omettre de
faire se compenser certains termes et surestimer l'incertitude) :
dG = (y-1/u)dx+xdy – udz/z² + (1/z +x/u²)du
étape 3 : pour obtenir l'incertitude absolue, on prend la valeur absolue des différents termes :
dG = (y-1/u) x+x y + u /z² z + (1/z +x/u²)u
- Exemple 2 :
( , , ) xu
G x y u yu
, Calculer
G
G
Exemple 3 :pour une longueur d’onde donnée, l’indice n est donnée par
sin( )
2
sin 2
m
DA
nA
Calculer
n
n
connaissant ∆Dm, et ∆A

5
INCERTITUDE SUR LA PENTE D’UNE APPLICATION AFFINE
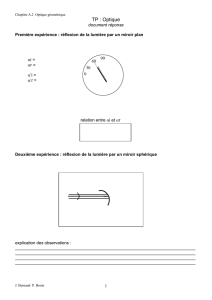
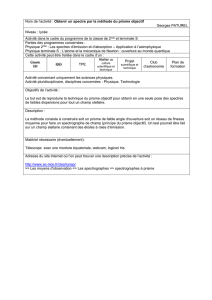
Les incertitudes absolues ("de lecture" et/ou calculées) doivent être en principe
représentées sur les graphiques demandés. Pour cela, on construit, autour de chaque valeur
la plus probable de y, un rectangle d'incertitude, de côtés 2.δx, 2.δy.
La courbe (ou la droite) la plus probable doit passer dans tous les rectangles
d'incertitude (fig.1).
Fig.1
Il en est de même de la courbe théorique, sauf dans des cas spéciaux que nous
n'aborderons pas ici.
Fréquemment, une grandeur physique est déterminée à l'aide de la pente d'une
application affine.
La question est : comment déterminer la "meilleure" application affine passant par une
série de mesures ?
Ayant des mesures ( x1;y1 ) ; ( x2;y2 ) ; ... ; ( xn;yn ) avec forcément des inexactitudes et
sachant par la théorie qu'elles définissent une droite, quelle est la "meilleure" droite
"passant" par ces points ?
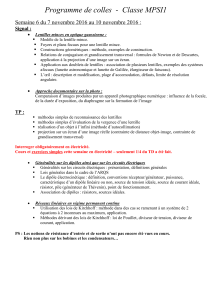
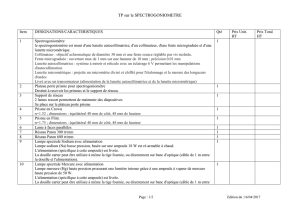
Sur le graphique ci-contre, n = 7.
Clairement la droite 1 est trop inclinée.
Clairement la droite 2 est trop basse.
Mais la droite 3 est-elle la "meilleure" ?
Que veut dire la "meilleure" ?
L'idée est de définir "la meilleure droite" par celle
qui est en moyenne la moins éloigné des points.
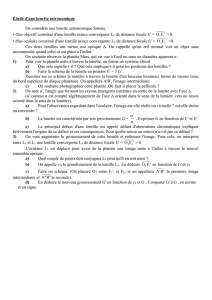
Il faut chercher à minimiser les distances :
..
k k k
d a x b y
représentées sur le
deuxième graphique (où n = 4).
Minimiser :
1..
n
kk
ka x b y
est compliqué, donc pour des raisons pratiques,
on cherchera a et b pour minimiser :
1
( , ) ( . . )²
n
kk
k
S a b a x b y
On montre que le minimum est obtenu pour :
a = ,
b = – a
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
1
/
22
100%