prevention du windup sous contraintes d`amplitudes et vitesses

PREVENTION DU WINDUP SOUS
CONTRAINTES D’AMPLITUDES ET
VITESSES
PETER HIPPE
Lehrstuhl für Regelungstechnik
Universität Erlangen-Nürnberg,
Cauerstr. 7, D-91058 Erlangen, Allemagne
[email protected]en.de
http://www.rt.e-technik.uni-erlangen.de/
Résumé— Les méthodes pour tenir compte des limitations
d’amplitude du signal de commande sont bien connues. Mais
aussi des limitations de vitesse peuvent causer des effets divers
dans le système en boucle fermée. Les méthodes existantes pour
éviter les phénomènes de windup en présence des contraintes
d’amplitudes et vitesses sont beaucoup plus compliquées que les
méthodes classiques anti windup , développée pour des
contraintes d’amplitude seulement. Ceci est dû au fait qu’il existe
un deuxième élément non linéaire pour la vitesse, qui complique
le test de stabilité. Dans cet article, nous présentons une solution
pour le problème considéré qui est très simple parce que le
modèle utilisé pour une limitation conjointe d’amplitude et de
vitesse ne contient qu’un seul élément non linéaire.
Mots clés— Systèmes non linéaires, windup, contrôle multivari-
able, contraintes de vitesse.
I. INTRODUCTION
Les systèmes et les régulateurs considérés sont linéaires, avec
les limitations du signal de commande en vue d’amplitude et
vitesse comme seuls éléments non linéaires dans la boucle de
régulation. Si on ne tient pas compte de ces deux contraintes,
cela peut causer des effets divers, voire un comportement
instable de la boucle fermée. La littérature existante offre un
grand spectre d’approches pour résoudre les problèmes causés
par l’amplitude limitée du signal de commande. On peut
distinguer deux phénomènes différentes, le windup du
régulateur et le windup du système. Le plus connu, le windup
du régulateur, est causé par la dynamique du régulateur (par
exemple de composante intégrale).
On peut éviter le windup du régulateur par une stabilisation du
régulateur pendant la période de saturation du signal de
commande. Les approches les plus connues sont
« Conditioning Technique » [7], « Generalized Anti Windup
Control » [1] et « Observer Technique » [8]. En [15] une
approche est présentée qui généralise les diverses méthodes
existantes.
Même sans éléments dynamiques dans le régulateur, comme
par exemple dans le cas d’un régulateur d’état, les limitations
d’amplitude peuvent provoquer un mauvais amortissement des
phénomènes transitoires, voire même produire des cycles
limites : on parle dans ce cas du phénomène de windup du
système. L’intensité de ce windup du système dépend de la
dynamique du système contrôlé [8], [13].
Pour éviter le windup du système, la partie linéaire du système
en boucle fermée doit être modifiée d’une manière appropriée.
Ceci est possible par la méthode du « Filtered Set Point » [16]
ou par un élément dynamique additionnel (EDA) [8]. Ainsi on
peut utiliser une méthode « deux stages ». On commence par la
prévention du windup du régulateur par des méthodes
structurelles (sans dynamique additionnelle) et si la partie
linéaire du système en boucle fermée indique le danger d’un
windup du système, on utilise un EDA ou le « filtered set
point ». Une approche qui résout les deux problèmes par un
schéma universel est présentée en [17].
Les méthodes discutées ci-dessus s’appliquent seulement pour
les systèmes stables, car, en présence d’un système instable, la
partie linéaire de la boucle ne peut pas être modifiée pour
satisfaire, par exemple, le critère du cercle. Une méthode pour
la prévention du windup en systèmes instables est présentée en
[9].
Cette méthode consiste d’un filtre non linéaire des signaux de
consigne qui utilise un modèle du système et un contrôle en
cascades contenant des éléments saturants. Ce filtre produit un
signal de commande qui ne dépasse pas les limites existantes,
et qui, si on le désire, reste dans une sous-région prédéfinie des
entrées limitées. Ainsi, les saturations à l’entrée du système
sont toujours inopérantes pour toutes les consignes, et par
conséquent, les propriétés du réglage linéaire sont toujours
conservées. En réservant une partie du signal de commande
pour la suppression des perturbations et en n’utilisant que la
partie restante pour appliquer la consigne, on arrive à une
boucle fermée non linéaire avec stabilité garantie.
Aussi le cas d’une commande avec amplitude et vitesse
limitées à trouvé beaucoup d’intérêt (voir par exemple les
citations en [5], [3] ou [2] et les discussions des approches
existantes dans ces références). Cependant les méthodes
existantes utilisent des modèles des actionneurs qui
contiennent deux éléments non linéaires (pour la saturation
d’amplitude et de vitesse). Par conséquent les investigations de
stabilité deviennent beaucoup plus compliquées en
comparaison des résultats obtenus en cas de limites
d’amplitudes seulement.
Cet article démontre qu’on peut utiliser presque toutes les
résultats anti-windup connus aussi en présence d’une limitation
conjointe d’amplitude et de vitesse, lorsqu’on utilise un
modèle « ersatz » pour un tel organe de la commande qui ne
contient qu’un seul élément non linéaire. Ce modèle consiste
d’une seule saturation et d’un système de premier ordre dont la
constante de temps est telle que la commande ne dépasse
jamais les limites de la vitesse. Ajoutant le système de premier
ordre au système à régler, le problème d’une limitation
conjointe d’amplitude et de vitesse se réduit au problème
windup bien connue pour le système augmenté.
Deux exemples, un système stable et un système instable,
illustrent l’approche proposée.
e-STA copyright © 2007 by see
Volume 4 (2007), N°1 pp 7-12

II. GENERALITES
Considérons un système multivariable, strictement propre,
invariant dans le temps et complètement commandable et
observable
)t(dD)t(xC)t(y
)t(dD)t(Cx)t(y
)t(dB)t(Bu)t(Ax)t(x
mdmm
d
ds
+=
+=
++=
&
(1)
où x ∈ ℜn est l’état, us ∈ ℜm la commande, d ∈ ℜq la
perturbation, y ∈ ℜm le vecteur à contrôler et ym ∈ ℜp sont les
mesures, avec p ≥ m.
En vue de la poursuite de signaux de référence constants, la
matrice de transfert
)s(D)s(NB)AsI(C)s(G 11 −− =−= (2)
du système est tel que )s(Ndet n’a pas de zéros à s = 0. La
sortie u(t) du régulateur est limitée par un élément non linéaire
))t(u(sat)t(u 0
us =, dont les composants sont défini par
m,,2,1i0u
uusiu
uuusiu
uusiu
)u(sat
i0
i0ii0
i0ii0i
i0ii0
iu i0
L=∀>
⎪
⎩
⎪
⎨
⎧
−<−
≤≤−
>
=
(3)
Supposons que les sorties à régler sont restreintes à évoluer
dans les régions symétriques
m,,2,1i,y)t(yy i0ii0 K=≤≤− (4)
dont les amplitudes y0i dépendent des limites u0i.
Dans la plupart des cas, on n’utilise qu’une partie de ces
régions pour l’opération du système. Cette partie est définie
par
m,,2,1i,r)t(yr i0ii0 K=≤≤− (5)
où les r0i sont les amplitudes maximales désirées et
m,...,2,1i,yr i0i0 =< (6)
Une discussion détaillée de ces régions d’amplitudes se trouve
en [10].
Pour les systèmes stables, les amplitudes i0
y sont les limites
d’opération. Pour les systèmes instables, ces amplitudes sont
les limites à éviter, car un comportement instable de la boucle
fermée pourrait se produire lorsqu’une sortie )t(yi atteint
l’amplitude i0
y. Par conséquent on doit assurer que (5) et (6)
sont satisfait.
Maintenant supposons que le signal )t(u si diffère de )t(u i,
m,...,2,1i = non seulement par 0u)t(u i0i >≥ (saturation
d’amplitude) mais aussi par 0u)t(u Vii >≥
& (saturation de
vitesse), c’est-à-dire on a un actionneur avec saturation
d’amplitude et vitesse définie par
{}
[]
m,...,2,1i,)t(u)t(usatsgnu)t(u siiuVisi i0 =−=
& (7)
où }{sat i0
u⋅ est la saturation définie en (3) et )sgn(
⋅
est la
fonction standard de signe [2].
En simulations numériques ce modèle provoque des problèmes
lorsque l’entrée à la fonction )sgn(⋅ disparaît et lorsque
Vii u)t(u
<
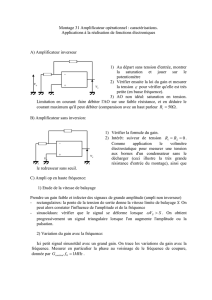
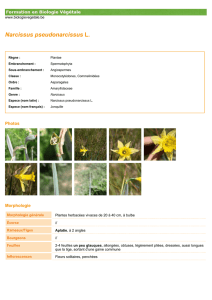
&. Un modèle plus approprié pour un élément non
linéaire
[
]
)t(usat)t(u i
u
u
si
Vi
i0
= avec saturation d’amplitude et
vitesse est montré en Fig. 1.
Fig. 1. Représentation schématique d’un élément avec
saturation d’amplitude et de vitesse
Le coefficient m,...,2,1i,Ri
=
est tel que la constante de
temps qui résulte n’a pas d’influence perceptible au
comportement de la boucle fermée. Les éléments non linéaires
en Fig. 1 sont de type saturation == )u(satu iusi i0 )u(sign i
{
}
ii0 u,umin 0u i0 > et
{
}
iViiiusi w,umin)w(sign)w(satw Vi ==
0uVi >, m,,2,1i K
=
.
S’il existe une limite d’amplitude seulement, un modèle
))t(u(sat)t(u 0
us = à la sortie du régulateur assure, que la
saturation à l’entrée du système n’est jamais activé. Par
conséquent seulement ce modèle entre dans les discussions
concernant le windup.
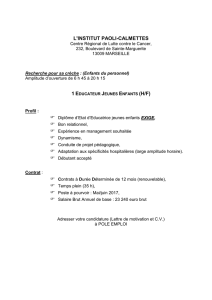
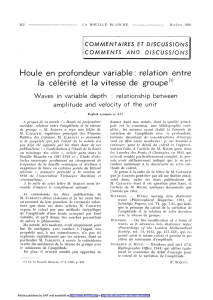
Si on a une saturation de vitesse en plus, on peut utiliser m
modèles « ersatz » aux m sorties )t(u i du régulateur comme
montré en Fig. 2.
Fig. 2. Modèle ersatz d’une saturation d’amplitude et de
vitesse
A cause de l’élément ))t(u(sat)t(u iusi i0
=, l’amplitude du
signal )t(u si ne dépasse jamais la limite i0
u. Et si on choisit
la constante de temps Vi
T comme
Vi
i0
Vi u
u2
T=,m,,2,1i K
=
(8)
la restriction Visi u)t(u ≤
& est satisfaite aussi. Il est évident que
la vitesse maximale se produit quand le signal )t(usi change
subitement d’une limite à l’autre, et avec Vi
T définie par (8)
cette vitesse maximale est Vi
u.
Lorsqu’on insert ces modèles ersatz aux sorties du régulateur,
ni la saturation d’amplitude ni la saturation de vitesse à
l’entrée du système devient actif et par conséquent, ces
éléments non linéaires n’ont plus d’influence au comportement
de la boucle fermée.
1sT
1
Vi +
si
uuiusi
i0
u
sat
i0
u
sat Vi
u
sat
Ri s
1usi
ui wi wsi
si
u
e-STA copyright © 2007 by see
Volume 4 (2007), N°1 pp 7-12

Si on ajoute les m systèmes de premier ordre
)t(x)t(u
)t(uB)t(xA)t(x
Vs
sVVVV
=
+=
&
(9)
avec
[]
mn1n
T
Vx,,xx ++
=L,
[]
sm1s
T
su,,uu L=,
⎥
⎦
⎤
⎢
⎣
⎡
=
Vm1V
T
VT
1
,,
T
1
tL,
(
)
VV tdiagA −= ,
(
)
VV tdiagB =
au système à régler, on obtient la description du système
augmenté
)t(dD)t(xC)t(y
)t(dD)t(xC)t(y
)t(dB)t(uB)t(xA)t(x
mdmm
d
ds
+=
+=
++=
&
(10)
avec
⎥
⎦
⎤
⎢
⎣
⎡
=
V
x
x
x, ⎥
⎦
⎤
⎢
⎣
⎡
=
s
m
mu
y
y (parce que le vecteur Vs xu = peut être
mesuré) et les paramètres
⎥
⎦
⎤
⎢
⎣
⎡
=
V
A0
BA
A, ⎥
⎦
⎤
⎢
⎣
⎡
=
V
B
0
B, ⎥
⎦
⎤
⎢
⎣
⎡
=0
B
Bd
d,
[
]
0CC =,
⎥
⎦
⎤
⎢
⎣
⎡
=I0
0C
Cm
m, ⎥
⎦
⎤
⎢
⎣
⎡
=00
0D
Dmd
md
A l’entrée de ce système augmenté il y a des éléments de
saturation ))t(u(sat)t(u iusi i0
=, m,...,2,1i
=
. Pour cette raison
la solution du problème d’un système avec saturation
d’amplitude et vitesse est aussi simple que la solution pour un
système avec saturation d’amplitude seulement, pourvu qu’on
utilise les modèles de Fig. 2 et conçoit le régulateur pour le
système augmenté.
Remarque 1. Les discussions ci-dessous sont également
valable en cas de saturation d’amplitude seulement et en cas de
limitation conjointe d’amplitude et vitesse. Si seulement
l’amplitude est limitée, les équations d’état (1), et si en plus la
vitesse est aussi limitée, les équations d’état (10) constituent la
description du système à régler. Pour obtenir une nomenclature
simple, dans ce qui suit nous supposons qu’il existe seulement
une saturation d’amplitude, parce qu’il est évident maintenant,
comment une saturation supplémentaire de vitesse peut être
traitée.
III. PREVENTION DU WINDUP DU REGULATEUR
Les techniques présentées par la suite s’appliquent aussi aux
régulateurs PI ou PID, parce qu’on peut interpréter chaque
régulateur linéaire comme régulateur d’état qui contient un
observateur [8], [13].
Si le régulateur contient des observateurs d’état et de
perturbations comme introduit par Johnson [14], le windup du
régulateur est évité lorsqu’on introduit le signal de commande
limité dans l’observateur (ce qui s’appelle « Observer
Technique »).
La partie linéaire de la boucle est alors caractérisée par le
retour d’état statique
)t(Lr)t(Kx)t(u
+
−
=
(11)
seulement [8], où r ∈ ℜm est le vecteur des signaux de
référence. Dans la boucle ouverte le comportement de transfert
entre s
u et u est donné par )s(u)s(G)s(u sL
−= où
B)AsI(K)s(G 1
L
−
−= (12)
Si le régulateur contient des modèles de signaux comme
introduit par Davison [6], le même )s(GL est obtenu en
utilisant les résultats présentés en [12].
La matrice
[
]
1
1B)BKA(CL −
−
+−= (13)
assure une erreur entre r(t) et y(t) nulle en régime permanent.
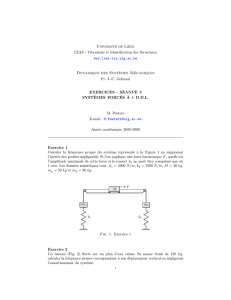
Après une application de la technique « Observer Technique »
le problème du windup du régulateur n’existe plus et les
phénomènes windup dépendent seulement de la matrice K,
c’est-à-dire du retour d’état choisi. Nous appelons ces
problèmes le « windup du système »
IV. PREVENTION DU WINDUP DU SYSTEME
(SYSTEMES STABLES)
La boucle en Fig. 3 est asymptotiquement stable si la matrice
de transfert (12) satisfait l’un des critères de stabilité pour des
boucles fermées comportant des non linéarités de secteur, par
exemple, le critère du cercle [18].
Fig. 3. Représentation schématique du comportement de
référence du système réglé après avoir appliqué la technique
« Observer Technique »
Si la matrice (12) viole le critère du cercle le danger de
« windup du système » existe dans la boucle fermée en Fig. 3.
On peut éviter ce windup du système par un élément
dynamique additionnel (EDA), c’est-à-dire on remplace
)t(Lr)t(u)t(u C
+
−
=
dans le schéma dans Fig. 3 par
)t(η)t(Lr)t(u)t(u C−
+
−
=
(14)
où
[]
)t(ξ)KK()t(η
)t(u)t(uB)t(ξ)BKA()t(ξ
S
sS
−=
−+−=
&
(15)
Le windup du système est évité, quand la matrice S
K en (15)
est telle que
=
)s(GLS B)AsI(K 1
S
−
− satisfait le critère du
cercle [12].
GL(s)
r
L
u
us
uC
G(s)
y
e-STA copyright © 2007 by see
Volume 4 (2007), N°1 pp 7-12

V. PREVENTION DU WINDUP DU SYSTEME
(SYSTEMES INSTABLES)
En utilisant le schéma qui a été introduit pour les systèmes
monovariables dans [9], on peut réaliser une boucle fermée
avec une dynamique adaptée au rejet des perturbations et, en
même temps, avoir un comportement vis-à-vis de la consigne
qui ne soit pas détérioré par les limitations. Cette approche
peut être appliquée aussi bien sur les systèmes stables
qu’instables.
Fig. 4 montre la version qui utilise un régulateur retour d’état
pour la stabilisation du système et le rejet des perturbations.
Mais il est démontré dans [13] comment on peut traiter des
régulateurs qui contiennent des observateurs et des modèles de
signaux de la même manière (c’est-à-dire prévention du
windup du régulateur par la « Observer Technique »).
Fig. 4. Schéma anti-windup utilisable pour systèmes stables et
instables
Pour la synthèse du filtre, on utilise un modèle
)t(x)t(C)t(y
)t(uB)t(xA)t(x
MMM
aMMMM
=
+=
&
(16)
du système (1) ayant les limitations (3) et il est supposé que ce
modèle est exact, c’est-à-dire )C,B,A()C,B,A( MMM =. Fig.
5 montre une représentation schématique de ce filtre, qui était
aussi discuté dans [11].
Fig. 5. Représentation schématique du filtre non linéaire pour
les grandeurs de consigne
La cascade intérieure est construite telle que, malgré des
consignes arbitraires, les signaux )t(uai ne dépassent jamais
les limites existantes i0
u m,...,2,1i =. Pour assurer cela, on
peut utiliser la norme L1. Cette norme est définie dans la
manière suivante.
Soient un système monovariable de fonction de transfert G(s)
et une fonction correspondante h(t). Un signal d’entrée u(t),
d’une amplitude maximale ulim, produit une amplitude
maximale ylim de la sortie y(t) limitée par
1
lim
0
limlim )s(Guτd)τ(huy =≤ ∫
∞
(17)
La quantité 1
)s(G de l’expression (17) est la norme L1 de
G(s) [4].
VI. DEUX EXEMPLES
Exemple 1. Le système stable est défini par
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
−
−−−=
100
121
010
A,
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=
1
1
0
B, 0Bd=,
[
]
112C
−
−
=
, ⎥
⎦
⎤
⎢
⎣
⎡−−
=001
112
Cm
et 0Dd
≡
,0Dmd
≡
. La saturation a l’amplitude 1u0
=
et la
sortie )t(y à régler est donc restreinte à 1)t(y1
≤
≤− . Nous
supposons que seulement la région 00 r)t(yr
≤
≤− avec
9.0r0
=
est utilisée.
Un régulateur d’état (11) avec observateur est construit tel que
le polynôme caractéristique est 3
)8s()BKAsIdet( +=+− et
la valeur propre de l’observateur est à s = -10, ce qui nécessite
[
]
511490833K
−
−
=
et 512L =.
L’observateur d’état
)t(TBu)t(Dy)t(Fz)t(z sm +
+
=
& (18)
(par le signal d’entrée )t(us le windup du régulateur est évité)
produit une valeur estimée
)t(zΘ)t(yΨ)t(x
ˆm
+
=
(19)
qui est correct en régime permanent si
m
DCFTTA
=
−
(20)
est satisfait. Avec 10F
−
=
et
[]
1458D −= on obtient
[
]
1116T
−
=
,
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
−=
95.0
75.0
10
Ψ et
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=
5.0
5.0
0
Θ
Comme la fonction de transfert B)AsI(K 1−
− viole le critère
du cercle il existe le problème du windup du système. Utilisant
un élément dynamique additionnel (EDA) (voir Section IV)
avec
[
]
262028KS
−
−
=
la fonction de transfert
B)AsI(K 1
S
−
− satisfait le critère du cercle et le problème du
windup du système n’existe plus.
Le comportement da la boucle fermée est stable pour toutes
consignes satisfaisant 9.0)t(r9.0 ≤
≤
−
.
0
u
sat
Système
linéaire
d
y
x
us
Filtre non
linéaire
y
M
uCr
r
xM
uCd
u
K
MMM
aMMMM
xCy
uBxAx
=
+=
&yM
La
Ka
Kb
Lb
xM
r
ua
ubs
ub
0
r
sat
e-STA copyright © 2007 by see
Volume 4 (2007), N°1 pp 7-12

Lorsqu’on introduit une saturation de vitesse avec 3uV
=
, et
applique une consigne )20t(1r)10t(1r2)t(1r)t(r SSS
−
+−−=
avec 25.0rS= un cycle de limite évolue.
La constante de temps (8) est 3/2TV= et le système
augmenté (10) est donc caractérisé par
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
−
−
−−−
=
5.1000
1100
1121
0010
A,
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
=
5.1
0
0
0
B,
[]
0112C −−= et
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡−−
=
1000
0001
0112
Cm
Le polynôme caractéristique =+− )KBAsIdet( 3
)8s( +
)15s( + est assuré par
[]
23509648023/24010K −−=
et cela donne 5120L =. L’observateur (18) et (19) pour les
états du système augmenté (10) a les paramètres
10F −= ,
[]
5.101458D −= ,
[]
11116T −= ,
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
−
−−
=
100
5.095.0
5.075.0
010
Ψ et
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
=
0
5.0
5.0
0
Θ
Aussi la fonction de transfert B)AsI(K 1
− viole tout critère de
stabilité pour des boucles fermées consistant d’une partie
linéaire et d’un seul élément non linéaire de type secteur.
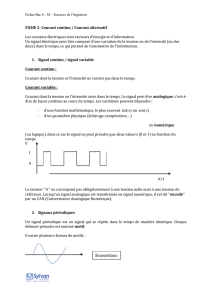
Lorsqu’on utilise un EDA qui est paramétré par le vecteur
[]
3/6.200774.1179174.873468.123KS−−= le com-
portement de la boucle fermé est stable pour toute consigne
bien que B)AsI(K 1
S
−
− ne satisfait pas le critère du cercle
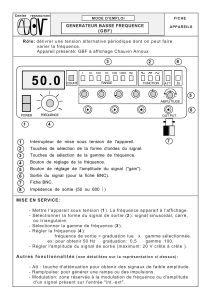
(mais le « critère du phase » [8]). Fig. 6 montre le
comportement transitoire de la boucle fermée avec limitations
d’amplitude et de vitesse qui est stable maintenant.
0 5 10 15 20 25 30
−1
−0.5
0
0.5
1
Temps
Sortie y(t)
Phenomenes transitoires
Fig. 6. Comportement transitoire avec le régulateur conçu pour
le système augmenté et avec le EDA
Exemple 2. Le système à contrôler est aussi discuté dans [9].
C’est le pendule inversé sur un chariot avec une amplitude de
saturation 10u0
=
. Les équations d’état (1) sont définies par
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡−
=
8528.6000
0000
0100
1008528.6
A,
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
−
=
2059.7
5037.1
0
0
B,
0Bd
≡
,
[
]
0010963.0C
−
=
, 4m IC = et
0DD mdd
=
=
La sortie y(t) est la position du chariot. Supposons qu’on
utilise un régulateur d’état
[]
)t(x)t(xK)t(u MCd −−= pour la
stabilisation du système instable tel que les zéros du polynôme
caractéristique )BKAsIdet(
+
−
sont placés à 6.5s1
−
=
,
15s2
−
=
, et à j96.5s 4/3
±
−
=
, ce qui correspond à un vecteur
[
]
033.14101.4666.1334905.2K −
−
−
=
.
Avec le filtre de consigne utilisé dans [9] (mais avec
_
021.1r =) le comportement du pendule devient instable
lorsqu’on introduit une limitation de vitesse 18uV
=
et
lorsqu’on applique des signaux de référence )t(1r)t(r S
=
avec
5.3rS≥.
Pour tenir compte de cette limitation, la construction du
régulateur doit être fondée sur la représentation augmenté (10)
du système. L’équation (8) mène à 1.1TV= et avec cette
constante de temps la représentation (10) et complètement
définie.
Si on place les valeurs propres du système augmenté à
6.5s1
−
=
, j96.5s 3/2
±
−
=
et 15s 5/4 −= , le vecteur K du
réglage stabilisant
[]
)t(x)t(xK)t(u MCd −−= est donné par
[
]
5197.33786.9166.2227545.22K −−−=
Le filtre de consigne a la structure montrée dans Fig. 5. Si on
place les valeurs propres par )t(uL)t(xK)t(u bsaMaa +−= à
8528.6s1
−
=
, 9.0s 4/3/2
−
=
et 0s5= et choisit 1La=, on
peut atteindre des amplitudes y(t) sans limites malgré la
limitation à l’entrée du système. Le a
K correspondant est
[
]
6142.9485.10078606.000Ka−−= .
Pour assurer que même des signaux de consigne arbitraires ne
produisent pas des signaux )t(ua qui dépassent la limite
10u0
=
on doit utiliser la norme 1
L de la fonction de transfert
[
]
a
1
M
1
Ma
bs
aLB)AsI(K1
)s(U
)s(U −
−
−+= . Cette norme est
68.9αlim
=
et par conséquent, 033.1
68.9
10
α
u
r
lim
0
0=== assure
des signaux 0a u)t(u ≤ pour toutes signaux de consignes. Vue
de l’entrée )t(ub, la boucle interne est un système linéaire et
stable avec une saturation ))t(u(sat)t(u brbs 0
= à l’entrée.
Si on ajoute une cascade extérieure )t(rL)t(xK)t(u bMbb +−=
tel que la fonction de transfert (en vue de 1La=)
e-STA copyright © 2007 by see
Volume 4 (2007), N°1 pp 7-12
 6
6
1
/
6
100%