Petits Moteurs à courant continu et aimants permanents

Petits Moteurs à courant continu et aimants permanents
M.C.C. = Machine à courant continu
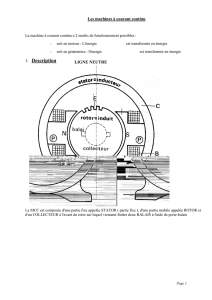
1 Description et principe de fonctionnement
Sur Internet, de nombreux sites fournissent des
Animations : http://sitelec.org/applets_walter_fendt/electricmotor_f/electricmotor_f.htm
Descriptions :http:// www.syscope.net/elec/C32.pdf
Les aimants permanents du stator créent un champ magnétique constant.
Les conducteurs du rotor sont parcourus par un courant continu.
Les forces de Laplace qui en résultent font tourner le rotor.
Le courant dans les conducteurs doit changer en fonction de leur emplacement dans le champ
magnétique : c'est le rôle du collecteur et des balais.
2 Exemple de réalisation
Petit moteur utilisé pour l'ouverture d'un tiroir de lecteur
de DVD.
Moteur fermé Rotor Flasque arrière Inducteur (stator)
3 Modèle du moteur – Equations
U est la tension d'alimentation du
moteur.
I est l'intensité du courant
d'alimentation du moteur.
R est la résistance des conducteurs du
rotor.
En fonctionnement continu L
n'intervient pas.
Ω est la vitesse de rotation en
Radian/seconde.
Cm est le couple fourni par le moteur
en Newton x mètre. K est une constante qui dépend du moteur.
Interprétation des équations :
Si le moteur doit fournir plus de couple => l'intensité du courant d'alimentation va augmenter.
Si on augmente la tension d'alimentation d'un moteur => sa vitesse de rotation augmente.
En pratique :
La grandeur à surveiller sera l'intensité du courant : si on demande trop d'efforts au moteur et que
l'intensité est trop importante (par rapport à la valeur nominale donnée par le constructeur) les conducteurs
du rotor, les balais et le collecteur sont subir des dommages.
petit_Moteur_CC.odt 20/10/15 1 / 3
Collecteur
Balais
Aimant

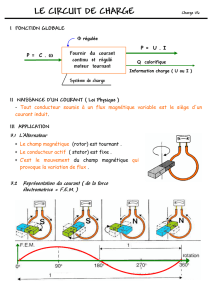
4 Controle de la vitesse du moteur
Controler la vitesse du moteur revient à controler sa tension d'alimentation. En général la source
fournit une tension constante (batteries etc ..). Il faut donc insérer un modulateur entre la source
et le moteur.
4.1 Controleur « ballast »
Il est facile à réaliser et à commander.
Inconvénient : mauvais rendement. En effet :
La source fournit la puissance P1 = U1 x I
Le moteur reçoit la puissance P2 = U2 x I
Le rendement P2 / P1 = U2 / U1 peut être
très faible si le moteur tourne lentement.
La puissance P1 – P2 est disspée par le modulateur sous forme de chaleur. Le plus souvent
c'est de la puissance perdue et c'est même un soucis pour refroidir le modulateur.
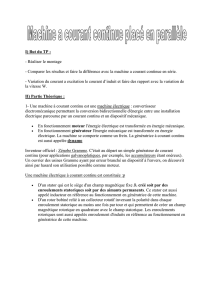
4.2 Controle par MLI
Un « interrupteur » est ouvert et fermé
périodiquement à fréquence élevée.
On règle la tension en ajustant le rapport
cyclique : rapport entre la durée à l'état fermé
et durée de la période.
L'inductance des bobines (coefficient L) est
utile ici pour « lisser » le courant électrique.
4.2.1 Exemple :
On constate que l'intensité du courant dans le moteur est quasiment continue.
Si à présent on alimente le moteur avec une tension continue de 5V, on trouve une intensité de
417mA, ce qui correspond bien à la moyenne de l'intensité du chronogramme ci-dessus.
On vérifie ainsi qu'une tension de 50V appliquée avec un rapport cyclique de 10% est
équivalente à 5V continus.
petit_Moteur_CC.odt 20/10/15 2 / 3

4.2.2 Bilan énergétique dans l'exemple précédent :
Puissance fournie par le générateur :
417 mA sous 50V, pendant 10% du temps
0mA sous 50V, pendant 90% du temps
Puissance absorbée par le moteur :
417 mA sous 5V en permanence
Le rendement théorique est donc de 100%.
4.2.3 Exemple de modulateur MLI
Les ordres de commande sont fournis
par un microcontroleur :
INA et INB pour le sens.
PWM pour la vitesse.
5 Le servomoteur de modélisme
Internet : http://www.brodeurelectronique.com/index.php?2007/03/15/16-les-servomoteurs
C'est un composant de modélisme et c'est en fait un petit
système qui peut rendre de nombreux services pour positionner
un élément. Son prix est abordable.
La commande est normalisée et on peut donc changer un
modèle par un autre.
A la différence du moteur Pas à pas qui fonctionne en « boucle
ouverte » (on ne vérifie pas sa position après un mouvement…)
le moteur du « servo » évolue jusqu'à ce qu'il soit dans la position
demandée par la commande.
5.1 Schéma de bloc interne
5.2 Le signal de commande
La tension d'alimentation nominale est
6V, c'est aussi la valeur maximale de la
tension du signal de commande.
Durée de l'impulsion :
Position « 0 » = 1,5ms
Position «min» = 1ms
Position « MAX » = 2ms
petit_Moteur_CC.odt 20/10/15 3 / 3
Bilan : 0,417 x 50 x 0,1 = 2,085W
Bilan : 0,417 x 5 = 2,085W
1
/
3
100%