Les machines à courant continu

Page 1
Les machines à courant continu
La machine à courant continu a 2 modes de fonctionnement possibles :
- soit en moteur : L'énergie est transformée en énergie
- soit en génératrice : l'énergie est transformée en énergie
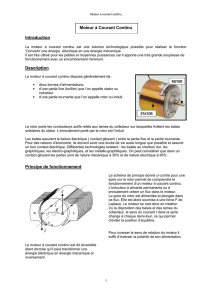
1. Description
La MCC est composée d'une partie fixe appelée STATOR ( partie fixe ), d'une partie mobile appelée ROTOR et
d'un COLLECTEUR à l'avant du rotor sur lequel viennent frotter deux BALAIS à l'aide de porte-balais
LIGNE NEUTRE

Page 2
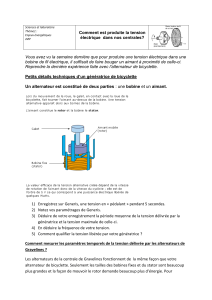
1.1. Le stator
Le stator crée le champ magnétique; c'est l'inducteur. Ce champ magnétique est :
- soit crée par un aimant permanent ( moteur de faibles puissances ). La machine est dite
si elle comporte un pôle N et un pôle S ; et est dite multipolaire si
elle comporte p pôles N et p pôles S
- soit crée par des bobines parcourues par des courants ( électro-aimants )
A quelles condition le flux crée par le stator est –il constant ?
-
-
Photo d’un stator bobiné
1.2 Le rotor : induit
C’est la partie mobile du moteur. Il est constitué de plusieurs enroulements répartis pour former un cylindre.
Le rotor comporte à la périphérie des encoches dans lesquelles vont venir se loger les conducteurs. On relie
2 conducteurs diamétralement opposés pour former une spire.
Rotor moteur courant continu
( utilisé en TP )
Autre rotor

Page 3
Le collecteur est un ensemble de lames de cuivre disposé suivant un cylindre en bout de rotor. Les
balais, portés par le stator frottent sur les lames du collecteur.
Collecteur : les lames de cuivre sont isolées les unes des autres
+
Remarque : Les balais sont en carbone et s'usent donc. C'est un des inconvénients de la MCC
Les balais frottent sur le collecteur. Les balais sont fixes et sont solidaires du stator

Page 4
D’autre part, parcouru par un courant variable et soumis à un champ magnétique, le rotor va être
soumis à des pertes par hystérésis. Plus la surface du cycle est importante, plus
Le rotor va donc être constitué à partie d
D'autre part, à chaque rotation du rotor, le flux est coupé. D'après Lenz, un courant induit, par ses effets va
s'opposer à la cause qui lui a donné naissance, c'est à dire qu'un courant induit va apparaître dans le rotor de
manière à freiner le rotor ( ce système de freinage est utilisé sur les camions et sur les bus : on parle de
ralentisseur ). Ce courant induit va entraîner un échauffement : ce sont les pertes par courants de
FOUCAULT
Comment limiter ces pertes ?
Plus généralement, on regroupe sous le terme pertes FER l’ensemble des pertes par hystérésis et
Foucault
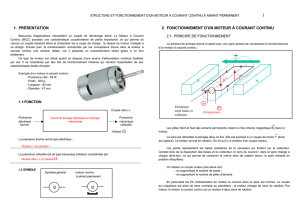
1.3. Principe de fonctionnement d’un moteur à courant continu
Expérience : Prenons un cadre mobile constitué d’une seule spire et parcouru par un courant.
Plaçons le dans un champ magnétique. Il sera alors soumis à une force de LAPLACE
F =
Position 1
Représenter le vecteur champ
magnétique entre les pôles de
l’aimant
Représenter alors la force
F
sur chaque longueur de la
spire. En déduire le sens de
rotation de la spire
N
B
C
A
D
I

Page 5
Si on admet que grâce à l’inertie la spire a franchi la ligne neutre, le circuit électrique devient alors :
Flécher alors les vecteurs force sur chaque longueur. Que se passe t-il ?
Que faudrait-il faire pour remédier au problème ?
Animation : http://www.edumedia-sciences.com/fr/a182-machine-a-courant-continu
Examinons l’extrémité du rotor : il possède un dispositif permettant l’inversion du courant tous les ½
tours : c’est le collecteur. Les balais sont immobiles et frottent sur le collecteur. Ils permettent donc
d’assurer la liaison entre la partie tournante et la partie fixe
N
B
A
D
C
Position 2 ( passage de la ligne neutre )
N
C
B
D
A
Position 3
I
 6
7
8
9
10
11
12
13
14
15
6
7
8
9
10
11
12
13
14
15
1
/
15
100%