Cpo2 Page 1 /2 I. Images et objets réels et virtuels II. Images et

Cpo2 Page 1 /2
Pour la formation d’images nous allons utiliser des systèmes optiques.
Nous allons nous intéresser aux conditions nécessaires pour réaliser des images.
Un système optique est constitué d’un ensemble de surfaces séparant des milieux d’indices différents. Les milieux seront
supposés homogènes
Un système centré est un ensemble de surfaces de révolution qui admettent un axe de symétrie commun (œil, lunettes …)
Soit (S) un système optique quelconque et soit A un point objet éclairé par une source de lumière. Si tous les rayons issus de A
viennent converger, après avoir traversé (S), en un point A’, alors A’ est l’image de A par (S).
I. Images et objets réels et virtuels
Cas n°1 :
En sortie les rayons sont convergents. Les images se
matérialisent sur un écran : on dit que l’image est réelle.
Cas n°2 :
En sortie les rayons sont divergents. L’image ne peut se
matérialiser sur un écran, elle n’existe pas réellement. L’image
semble provenir de A’ : on dit que l’image est virtuelle.
Dans les deux cas l’œil voit A’ et ne fait pas la distinction.
Une image réelle est située après le dioptre de sortie et peut se matérialiser sur un écran alors qu’ une image virtuelle est située avant le
dioptre de sortie.
De même : un objet réel est situé avant le dioptre d’entrée, et un objet virtuel est situé après le dioptre d’entrée.
II. Images et objets à l’infini
Définitions : Objets ou images supposés infiniment loin du système optique.
Propriétés :
Un point objet à l’infini sur l’axe principal n’émet que des rayons parallèles à l’axe optique.
Un point objet à l’infini hors de l’axe principal émet des rayons parallèles entre eux.
Un point image à l’infini est caractérisé par des rayons émergents parallèles. S’il est sur l’axe, ces rayons sont parallèles à l’axe optique.
Remarque : Concrètement en TP, une image est supposée à l’infini si on l’observe à une distance grande devant la taille caractéristique du
montage
III. Définitions des foyers et de la focale
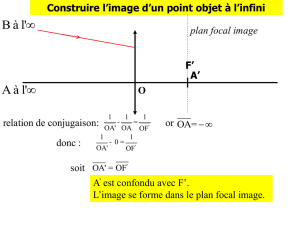
Foyers principaux : Si on cherche la position de l’image d’un point objet situé à l’infini sur l’axe principal. Un point situé
à l’infini sur l’axe optique envoie des rayons parallèles à l’axe optique. Le foyer principal image est le point de
convergence des rayons incidents parallèles à l’axe optique. On le note
'F
. L’image d’un point situé à l’infini sur
l’axe optique se forme donc au foyer principal image.
Propriétés d’un système optique
A
A
’
(S)
R1
R2
R’1
R’2
écran
œil
A
A
’
(S)
R1
R2
R’1
R’2
œil

Cpo2 Page 2 /2
Le foyer principal objet est le point objet sur l’axe principal dont l’image est rejetée à l’infini. On le note
F
.
Tous les rayons passant par
F
ressortent parallèles à l’axe optique.
On définit la distance focale image :
''f SF
et la distance focale objet :
f SF
. D’après ce qui
Plans focaux et foyers secondaires : Les foyers secondaires images sont les points de convergence des rayons
incidents parallèles entre eux. Tous les rayons incidents passant par un foyer secondaire objet ressortent parallèles
entre eux. Les foyers secondaires (images et objets) sont dans le plan perpendiculaire à l’axe optique qui contient le
foyer principal : on parle de plan focal image ou objet.
II. Les conditions d’observation d’une image
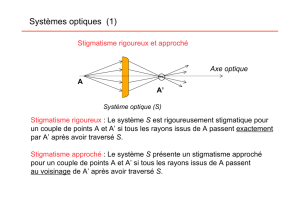
1. Stigmatisme
Définition :Un système optique est dit rigoureusement stigmatique pour le couple de points
conjugués A et A’ si tous les rayons issus du point objet A passent, après la traversée du
système, par le point image A’.
Propriétés :
Aplanétisme : propriété de conservation de stigmatisme dans un plan perpendiculaire à l’axe optique.
Stigmatisme le long de l’axe
Pour avoir le stigmatisme rigoureux dans l’espace, il faut que les deux conditions précédentes soient vérifiées simultanément .
Exemples :Le miroir plan, le dioptre plan (contre exemple)
Remarque : Le stigmatisme rigoureux est très rarement réalisé (miroir plan) mais n’est nullement nécessaire en pratique. En effet le point
image est destiné à être vu soit par l’œil, soit par un récepteur optique (capteur CCD : Dispositif à transfert de charge (Charge Coupled
Device) pour les caméscopes …) qui ne sont pas des points mais des objets de taille finie. Ce ne sont pas des systèmes optiques parfaits, ils
voient comme un point toute tache de lumière de taille inférieure à la dimension des récepteurs.
Nous allons définir des conditions de stigmatisme approché.
2. Conditions de l’approximation de Gauss
Ce sont des conditions permettant d’obtenir des images de bonne qualité au moyen de systèmes optiques centrés :
L’objet doit être plan, perpendiculaire à l’axe et de petites dimensions
L’objet ne doit envoyer sur le système optique que des rayons paraxiaux, c’est à dire faiblement inclinés par rapport à
l’axe optique et voisins de cet axe.
Dans ces conditions, l’image obtenue est de bonne qualité, plane et perpendiculaire à l’axe optique. Il y a alors un stigmatisme transverse
approché.
Remarques :
Un diaphragme peut permettre d’accéder à ces conditions mais il faut se méfier de la luminosité qui peut devenir
insuffisante et de la diffraction qui peut apparaître si le diaphragme est trop petit.
Se rajoute des problèmes de dispersion que entrainent des abbérations chromatiques (voir TP)
A
A’
(S)
0
i
1
/
2
100%