Thermique - Doppler

Travaux pratiques de Physique
PSI 1, 2, *
1. Transferts thermiques
2. Mesures de portances et de traînées
3. Mesure d’une vitesse par décalage Doppler

Lycée Kléber TP de Physique
Transferts thermiques
Le but est d’observer, de mesurer et de modéliser les échanges thermiques au voisinage d’un com-
posant électronique de puissance (puce). On envisagera successivement le régime permanent et le
régime variable.
I. Le régulateur intégré de tension (R.I.T.)
1. Principe de la manipulation
Le R.I.T. est un circuit intégré de puissance inséré dans un boîtier en plastique. L’énergie thermique
dissipée par effet Joule dans la puce est transférée vers l’atmosphère extérieure à travers ce boîtier.
L’étude des transferts thermiques est effectuée grâce à la mesure de la température de ce boîtier, seul
accessible à un thermomètre. Le contact thermique entre le boîtier et la sonde thermométrique est
assuré par une pâte thermique. L’importance de l’énergie thermique mise en jeu nécessite l’utilisa-
tion d’un radiateur à ailette, fixé sur le boîtier. Les échanges se font par conduction et par échange
conducto – convectif (convection naturelle).
2. Utilisation du R.I.T.
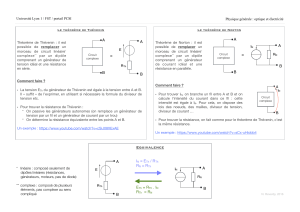
Le composant possède trois bornes. La tension
d’entrée est appliquée entre la borne d’entrée et la
borne centrale, la tension d’utilisation est dispo-
nible entre la borne de sortie et cette même borne
centrale ; cette borne commune, borne centrale, est
en général reliée à la masse.
Le composant présente deux propriétés impor-
tantes : Lorsque la tension d’entrée Ueest supé-
rieure à 8 V, la tension de sortie Usest fortement
stabilisée à la valeur de 5 V. Le courant de sortie
est égal au courant d’entrée I.
Le choix de la résistance de charge Rfixe donc la valeur de l’intensité Iainsi que celle de la puis-
sance électrique délivrée en sortie : I=5
R,Ps= 5I(Ien A, Ren Ωet Psen W).
La puissance dissipée dans la résistance Rétant importante, il faut impérativement utiliser un
rhéostat, à l’exclusion de tout autre résistance (boîte AOIP, boîte à plots, résistance radio...).
La tension d’entrée est fournie par une alimentation stabilisée.
II. Travail préparatoire : étude du régime permanent
1. Modélisation
Le RIT reçoit la puissance thermique Ppar effet Joule et la dissipe dans l’atmosphère par conduc-
tion. En notant Γla capacité thermique du RIT et Rth la résistance thermique des éléments assurant le
transfert thermique entre le RIT et l’atmosphère, à la température T0l’équation différentielle vérifiée
par la température Tdu RIT est : ΓdT
dt+T−T0
Rth
=P. (cf. Annexe).
Cette équation du premier ordre laisse apparaître la constante de temps τ=TthΓ. Au bout d’une
durée de fonctionnement grande devant τ, le régime permanent est atteint et la température du RIT
2

TP de Physique PSI 1,2,*
est telle que TRP −T0=P Rth. Les mesures de TRP ,T0et Pconduisent à la valeur de Rth.
2. Résultats des mesures
Des mesures préalables ont été effectuées pour cinq tensions d’entrée : dans chaque cas la résistance
Rreste la même, sa valeur est telle que l’intensité du courant débité par le RIT est I= 0,8 A ; chaque
mesure dure 16 minutes, à raison d’un relevé de température toutes les 10 secondes.
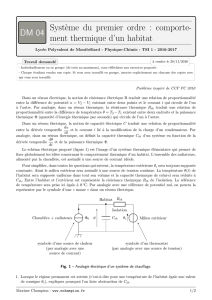
Les courbes ci-dessous représentent T−T0en fonction du temps (Attention, la température T
mesurée est en réalité celle du boîtier).
Une modélisation permet d’obtenir la constante de temps ainsi que les températures atteintes en
régime permanent.
Les résultats sont consignés dans le tableau ci-dessous :
Ue(V) 8 10 11 11,5 14
I(A) 0,85 0,85 0,85 0,85 0,85
P(W)
T−T0(K) 26,69 44,67 53,05 58,37 81,94
τ(s) 219,8 230,6 231,8 217,2 202,7
Rth (K/W)
3

Lycée Kléber TP de Physique
Compléter les deux lignes manquantes et donner la valeur de la résistance Rth.
3. Calcul de la résistance thermique
La puce, le boîtier, le radiateur et l’air sont modélisés par des systèmes homogènes dont la tempé-
rature est uniforme, les gradients de température sont localisés au voisinage des surfaces de contact
de ces divers systèmes.
Les données du constructeur du composant sont les suivantes :
Rth(boîtier/radiateur) = 1 K ·W−1Rth(radiateur/air) = 7 K ·W−1
Rth(boîtier/air) = 35 K ·W−1Rth(puce/boîtier) = 4 K ·W−1
Après avoir fait le schéma thermique équivalent du montage, (par analogie avec une association
de résistances électriques), calculer la résistance thermique totale Rth(boîtier/air)tot entre le boîtier et
l’air.
Comparer avec la valeur trouver expérimentalement et discuter les limites de la modélisation.
III Régime transitoire
1. Chauffage du RIT
Attention : le composant peut être très chaud, veiller à ne pas se brûler.
– Choisir une valeur de I(comprise entre 0,8 et 1 A). Déterminer la valeur de Rcorrespondante. En
branchant l’ohmmètre aux bornes du rhéostat (seul !), ajuster la position du curseur pour obtenir cette
valeur de la résistance. Brancher alors le rhéostat en sortie du RIT, un ampèremètre en série permet
de contrôler la valeur de I.
– Choisir une valeur de la tension d’entrée Ue(entre 8 et 10 V). En branchant le voltmètre aux
bornes de l’alimentation stabilisée (seule !), ajuster la tension à cette valeur. Éteindre l’alimentation et
la relier à l’entrée du RIT. Un voltmètre permet de contrôler la valeur de Ue.
– Mesurer la température T0de l’atmosphère ambiante et la température T=Tidu boîtier.
– Mettre en marche l’alimentation et déclencher le chronomètre. Relever la température toutes les
20 ou 30 secondes sur une durée de 15 à 20 minutes. Noter les valeurs mesurées de Ueet I.
Attention, une fois le RIT alimenté, il est impossible de revenir en arrière, sauf à tout arrêter puis
à attendre (longtemps) le refroidissement du composant.
2. Refroidissement
Couper l’alimentation et arrêter le chronomètre. Relever la température et déclencher le chrono-
mètre pour une nouvelle série de mesure comparable à la précédente.
3. Exploitation des mesures
Utiliser un tableur pour représenter la courbe θ=T−T0en fonction du temps t.
Utiliser le modèle adapté pour identifier les différents paramètres θi,θfet τde l’expression θ(t) =
θf−(θf−θi) exp(−t/τ)solution de l’équation différentielle (donnée en annexe) lors du chauffage. En
déduire les valeurs de Rth et Γ.
De même, identifier les paramètres θ0
iet τ0de l’expression θ0(t) = θ0
iexp(−t/τ)lors du refroidisse-
ment. Comparer les deux valeurs trouvées pour τet τ0. Conclure.
4

TP de Physique PSI 1,2,*
ANNEXE : CONDUCTION THERMIQUE
Bilan énergétique
1. Premier principe de la thermodynamique
Considérons un système, de capacité thermique Γ, dont la température Test uniforme et qui
n’échange que de la chaleur avec le milieu extérieur.
La variation de son énergie interne au cours d’une évolution infinitésimale de durée δt s’écrit :
dU=δQ, soit ΓdT=δQ ou ΓdT
dt=δQ
dt.δQ
dtest la puissance thermique reçue par le système.
2. Cas d’un système dissipant de l’énergie thermique par conduction
Supposons que le système dissipe de l’énergie thermique par conduction à travers un conducteur
de résistance thermique Rth.
La température du système étant notée T, celle du milieu extérieur étant T, le flux thermique trans-
porté par le conducteur, du système vers le milieu extérieur, s’écrit : Φth =T−T0
Rth
.
Ainsi la puissance thermique "reçue" par conduction par le système est Pth =−T−T0
Rth
.
Si par ailleurs le système reçoit une puissance thermique P(par effet Joule, par exemple), le pre-
mier principe s’écrit : ΓdT
dt=P+Pth =P−T−T0
Rth
. La température du système vérifie l’équation
différentielle : ΓdT
dt= +T−T0
Rth
=Pou RthΓdT
dt+T−T0=RthP.
En notant θ=T−T0l’écart de température entre le système et le milieu extérieur, cet écart vérifie
l’équation différentielle RthΓdθ
dt+θ=RthP. La constante de temps apparaît clairement.
Notons l’analogie avec la charge d’un condensateur de capacité Cpar une source de tension U0à travers une
résistance R; la tension uaux bornes du condensateur est donnée par τdu
dt=U0avec τ=RC.
Le régime permanent permet de mesurer Rth :Rth =TRP −T0
P.
En l’absence de source d’énergie thermique (P= 0), τdθ
dt+θ= 0 : la température décroît expo-
nentiellement : θ(t) = θ(0) exp(−t/τ).
5
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%