Contrôle de moteur CC : Variation de direction et de vitesse

Page 1 / 3
SSI
SCIENCES DE
L’INGENIEUR
St Jo
Avignon
distribuer l'energie electrique vers un mcc :
changement de sens & variation de vitesse
FICHE DE
cours
V Chassilian
SW1
SW2
SW3
SW4
+88.8
Vcc
1. Comment inverser le sens de rotation du moteur à courant continu ?
1.1. Principe de l’inversion de sens :
L’inversion de sens s’effectue en :
- Inversant le sens du courant circulant dans l’induit pour un MCC à aimant permanent,
- Inversant le sens du courant circulant dans l’induit ou dans l’inducteur pour un MCC à bobinages.
On étudiera uniquement le cas où
l’inversion de sens s’effectue
en inversant le sens du courant
circulant dans l’induit pour un MCC à
aimant permanent :
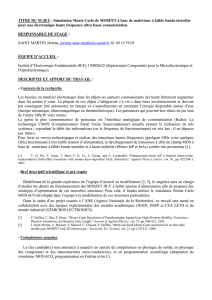
1.2. Commande de l’inversion de sens :
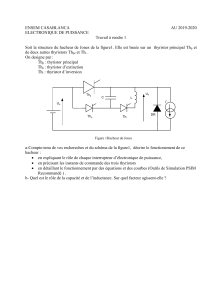
On utilise un « pont en H ». Le moteur est au milieu de ce pont d’interrupteurs.
Rotation sens 1 : SW1 et SW4 sont fermés, rotation sens 2 : SW2 et SW3 sont fermés.
Ces interrupteurs peuvent être réalisés par les interrupteurs d’un relais, des transistors bipolaires (NPN/PNP), des
transistors à effet de champ (MOSFET, canal N ou P) :
DISTRIBUER
CONVERTIR
ALIMENTER
Energie
électrique
…
Moteur à
Courant
Continu
Energie
électrique
…
Energie
électrique
(jusqu'à 50A)
Ordre : signal électrique
(quelques µA ou mA)
Energie
mécanique
de rotation
dans les 2 sens
à vitesse
variable
M
12V
KA1
KA1
KA2
KA2
M

Page 2 / 3
SSI
SCIENCES DE
L’INGENIEUR
St Jo
Avignon
distribuer l'energie electrique vers un mcc :
changement de sens & variation de vitesse
FICHE DE
cours
V Chassilian
BAT1
1.5V
+88.8
D1
DIODE
xVcc
T
th
UmoyenUmoteur
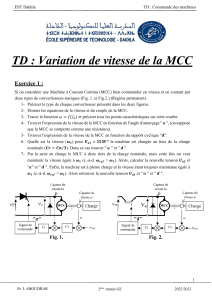
1.3. Distribution de l'énergie vers l'actionneur, l'ordre provenant d'un microcontrôleur
Attention : Lorsque l'on utilise des transistors MOSFET en commutation, la tension Vgs doit être nulle ou
égale à Vcc (Tension d'alimentation), cela signifie que la tension Vg (ordre) appliquée sur la grille doit être
égale à la tension d'alimentation. On ajoutera des transistors MOSFET ou un circuit intégré afin d’adapter la
tension.
2. Comment faire varier la vitesse de rotation d’un moteur à courant continu ?
2.1. Principe
Quand on veut faire varier la vitesse d’un moteur, la première idée qui vient à l’esprit est de faire varier la
tension aux bornes du moteur mais on constate que pour des valeurs faibles de la tension, le moteur ne
tourne pas car le moteur demande une tension minimale assez importante pour démarrer.
Lorsque la tension est trop basse, les forces électromagnétiques ne sont pas suffisantes pour combattre le
frottement, il devient donc difficile d’ajuster la vitesse de façon précise. La solution est donc de fournir au
moteur sa tension maximale mais par intermittence, c’est ce que l’on nomme la MLI ou PWM en anglais
(Modulation de largeur d’Impu lsio ) ou (Pulse width Modulation ).
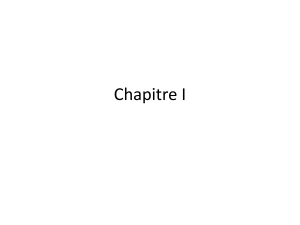
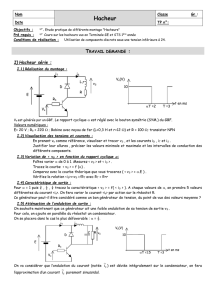
2.2. Réalisation d’une MLI avec un hacheur :
Le hacheur va transformer une tension continue en un signal carré dont on fera varier le rapport cyclique.
Schéma fonctionnel et structurel du montage :
Le hacheur joue un rôle
d’interrupteur, commandé
en Tout ou Rien par un
signal périodique dont on
fera varier le rapport
cyclique.
Alimenter
En Tension
continue
charge
=
=
Convertir l’énergie
électrique en
énergie Mécanique
Umoteur
Vcc
Umoyen
th
T
t

Page 3 / 3
SSI
SCIENCES DE
L’INGENIEUR
St Jo
Avignon
distribuer l'energie electrique vers un mcc :
changement de sens & variation de vitesse
FICHE DE
cours
V Chassilian
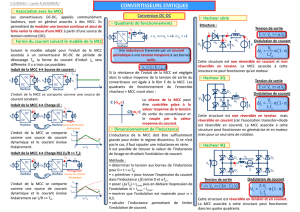
Composant utilisés pour réaliser un hacheur :
- transistor bipolaire, - transistor MOS, - thyristor
Robuste mais nécessitent un
courant important pour leur
commande et leur temps de
conduction provoque une
consommation importante.
Le choix du composant dépendra du couple souhaité, et des contraintes imposées par le cahier des charges.
2.3. Réalisation d’une MLI avec un microcontrôleur :
Dans la majorité des cas, les systèmes sont équipés de microcontrôleurs, il faut donc produire à la sortie du
microcontrôleur un signal carré de rapport cyclique variable.
Ex ARDUINO :
pinMode (moteurA_speed,OUTPUT); // Broche vitesseMotA configurée en sortie
digitalWrite(moteurA_speed,HIGH); // moteur à vitesse maxi
digitalWrite(moteurA_speed,LOW); // moteur à l'arrêt
analogWrite(moteurA_speed,i); // PWM avec 0 < i < 255 ; 0 à l'arrêt, 255 vitesse maxi
Plus fragiles que
les transistors
bipolaires mais
leur commande
nécessite peu
de courant et
donc de
puissance.
La mise en œuvre du thyristor dans
les hacheurs est très délicate car
l'annulation du courant dans les
interrupteurs lors du blocage n'est
pas naturelle. Cependant aux très
fortes puissances, le thyristor est
irremplaçable.
1
/
3
100%