Chirurgie Assistée par Ordinateur ( CAO ) Notice d

Chirurgie Assistée par Ordinateur
( CAO )
Notice d'information Dr BRAHIN
pour
Intervention du 00/00/00
La chirurgie assistée par ordinateur ( CAO ) a connu au cours de ces dernières années un certain
engouement à l’origine de l’apparition sur le marché d’un certain nombre de machines
susceptibles de guider le chirurgien orthopédiste au cours de la réalisation de son geste
chirurgical. Cette technique de pose des prothèses est encore très rarement employée car assez
astreignante pour les chirurgiens avec un apprentissage qui déroute beaucoup de ces derniers .
La CAO est employée dans de nombreux domaines dont le plus répandu est en neuro chirurgie
dans les interventions sur le cerveau notamment .
Le Dr BRAHIN a pris la décision d'utiliser cette technique dans votre cas et en conséquence a
fait une demande du matériel spécifique servant à effectuer une CAO .
N'hésitez pas à demander l'opinion de votre médecin traitant sur ce sujet .
Toute procédure chirurgicale, classique ou assistée, n’est autre que la réalisation d’une action
tridimensionnelle (pose d’un implant par exemple) au sein d’un espace à trois dimensions (le bloc
opératoire), sur un objet tridimensionnel (le patient). Avec la CAO la planification est totalement
réalisée en per-opératoire donnant tous les aspects tridimensionnels du positionnement de la zone
opérée et des instruments .
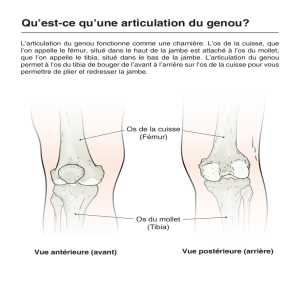
Que voit-on et ne voit-on pas au cours de la chirurgie du genou ?
Au cours de la mise en place d’une prothèse totale du genou par voie classique on voit
parfaitement les surfaces articulaires, les ligaments, les espaces en flexion et en extension.
Ce que l’on ne voit pas c’est le centre de la tête fémorale, l’axe mécanique du fémur, la
réductibilité et le degré de réductibilité de la déformation, l’axe mécanique du tibia, l’angle
fémoro tibial (HKA) et la rotation fémorale qui doit comprendre non seulement la torsion
fémorale épiphysaire mais également la torsion fémorale globale incluant l’antéversion (ou non)
du col fémoral. Les instrumentations classiques ont été pendant des années (et encore
actuellement !) une aide précieuse pour positionner du mieux possible les prothèses, mais bien
des études montrent les pièges et les insuffisances de ces instrumentations .
Par ailleurs la planification radiologique pré opératoire connaît des limites d’une part parce que
certaines goniométries ( mesures des axes) sont mal réalisées et d’autre part, parce que certaines
déformations rendent très imprécises les mesures pré opératoires.

La technologie des localisateurs 3D
La notion de localisation est une notion très générale ; des problèmes de localisation se posent
aussi bien dans les domaines balistiques, nautiques, aéronautiques, de robotique industrielle, que
dans le domaine médical. Dans la scène chirurgicale 3D, et plus généralement dans le cadre de la
CAO, le problème à résoudre est celui de la localisation d’un solide indéformable.
Pour localiser ces objets, il conviendra de connaître non seulement leur position, mais également
leur orientation spatiale. Pour décrire la position d’une structure osseuse dans la
scène chirurgicale, il suffira de décrire la position d’un point quelconque de cette dernière en y
attachant un repère facilement localisable dans l’espace. Ce dernier prendra ici le nom de corps
rigide. Ils peuvent être de nature variable, mais quelque soit l'approche utilisée, il existera
toujours une source et un récepteur. Plusieurs types de technologies ont été testées, magnétique,
ultra-sonique ou optique. A ce jour, seule la technologie optique donne satisfaction en terme de
précision et de robustesse. La source est fixée sur la structure osseuse, elle émet un signal
lumineux qui est ensuite enregistré par une caméra externe . Le signal lumineux émis (ou
réfléchi) est un signal infra-rouge de longueur d'onde 800nm, différent des 400 à 500 nm du
signal lumineux émis par les scialytiques des blocs opératoires. La détection s'effectue à l'aide de
caméras CCD uni ou bidimensionnelles .
Au terme de la phase de recalage automatique, il est possible au chirurgien de contrôler la
précision du résultat.
Cette précision est donnée interactivement en désignant des points au hasard sur la structure
osseuse à l'aide du palpeur 3D. Pour chaque point physique ainsi désigné, le système recherche le
point le plus proche dans le modèle et calcule sa distance euclidienne avec le point désigné.
En pratique clinique, il apparaît que cet écart est toujours inférieur à 1 mm dans les zones où
l'information a été saisie, et proche de 1 mm dans les zones où l'information a été reconstruite.
Une analyse globale de la précision est également réalisée par le système en cours d'intervention.
Elle repose sur le calcul de l'erreur rms ou root mean square error. Si cette valeur est supérieure à
1 mm, le recalage est rejeté et l'acquisition des points doit être réitérée.
En pratique clinique nous avons montré que l'erreur moyenne est inférieure au millimètre ce qui
positionne cette méthode au même rang que les méthodes à base d'images tomodensitométriques
qui constituaient jusqu'à ce jour le gold standard des acquisitions morphologiques spécifiques du
patient.
Pourquoi la navigation informatisée ?
Pour la chirurgie du genou, nous avons besoin d’une assistance pour localiser ce que l’on voit
mal et rendre plus reproductible des notions purement subjectives.
Objectis et systèmes

@ les objectifs sont :
* Le maintien d'un axe idéal du membre inférieur (le plus proche possible de 180°).
* Un bon équilibrage ligamentaire aussi bien en flexion qu'en extension afin d'assurer une
bonne mobilité et une bonne stabilité.
* Un bon centrage rotulien.
La chirurgie traditionnelle, avec les guides de coupe et les gabarits appropriés, permet
évidemment de s'approcher au plus près du résultat recherché mais la chirurgie assistée par
ordinateur nous permet d'optimiser le placement des implants.
La précision apportée par la chirurgie assistée par ordinateur dans la mise en place des prothèses
totales du genou n'est actuellement plus à démontrer. De nombreuses études ont confirmé
l'amélioration indéniable du positionnement des implants par rapport à la chirurgie traditionnelle.
La chirurgie assistée par ordinateur est donc de plus en plus utilisée par le Dr BRAHIN et
permettra très certainement d'améliorer de façon sensible le résultat clinique à long terme, même
si ce n'est à l'heure actuelle pas démontré.
@ Les systèmes existants :
3 types de systèmes existent :
Les SYSTÈMES ACTIFS comme le système CASPAR et ROBODOC , ces systèmes robotisés ,
identiques à la robotique en industrie pour façonner des pièces , sont actuellement abandonnés.
Les systèmes utilisés actuellement sont des SYSTÈMES PASSIFS, dits systèmes de navigation
informatisés.
Les SYSTEMES SEMI-ACTIFS sont en cours d'expérimentation et d'essai avec d'autres
systèmes plus maniables, comme le robot PRAXITELES, en cours d'évaluation, et qui sera
bientôt disponible. Il s'agit d'un système semi-actif de guide de coupe universel fixé sur les os du
patient et relié à un système de navigation sans imagerie qui permet son positionnement.
Les SYSTEMES PASSIFS sont de plus en plus utilisés actuellement.
Il s'agit de systèmes avec ou sans imagerie préopératoire.
Le Dr BRAHIN utilise un système sans imagerie , nommé NAVITRACK de ORTHOSOFT, avec
reconstitution virtuelle des surfaces articulaire est la reconstruction en 3D obtenue par la
corrélation de points palpés par le chirurgien sur les surfaces articulaires du patient et de points
obtenus à partir d'un modèle statistique afin d'avoir une reproduction sur l'écran d'ordinateur des
surfaces articulaires du patient à opérer.

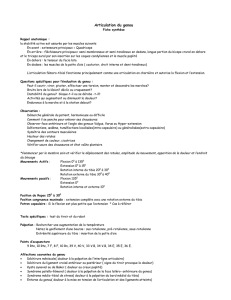
Ceci nécessite d'utiliser une caméra optique infrarouge (localisateur) qui suit les mouvements et
localise la position des os dans l'espace grâce à des pastilles réfléchissantes qui sont fixées
solidement sur le fémur et sur le tibia sur des "corps rigides". Le palpeur utilisé par le chirurgien
ainsi que les guides de coupe sont également reliés par infrarouge à la caméra permettant au
chirurgien d'être guidé pendant toute l'intervention par les images affichées sur l'écran de
l'ordinateur.
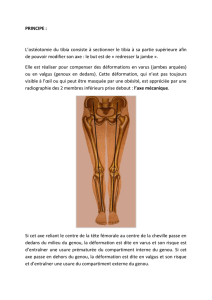
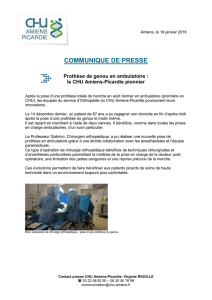
Les surfaces osseuses vont être palpées par l'instrument calibré afin d'obtenir une reconstruction
en 3D de la surface articulaire. Le déroulement des différents temps opératoires est donc visualisé
sur l'écran d'ordinateur, étape après étape.
exemples des images obtenues sur l'écran du moniteur de l'ordinateur
Déroulement de la mise en place d’une Prothèse de genou
Nous avons tout d’abord besoin d’un système qui permette d’implanter la prothèse selon les
objectifs que l’on s’était fixé en pré opératoire et selon un standard d'axe le plus proche de la
normale et qui parait le mieux adapté au patient .
Même si certains auteurs pensent que l’axe mécanique est secondaire et qu’il est préférable
d’avoir une bonne balance ligamentaire, de nombreuses études de la littérature montrent que
lorsque la déviation résiduelle est importante les échecs sont nombreux en terme d’usure et de
descellement des prothèses
La torsion fémorale globale est une notion que seul l’ordinateur permet d’appréhender pour
l’instant. Il s’agit de la goniométrie dynamique qui permet de voir comment évolue la déviation
du genou en fonction de la flexion du genou. Certains genoux voient leur déviation augmenter en
flexion, d’autres le voient diminuer et d’autres enfin restent stables entre la flexion et l’extension.
La réductibilité de la déformation est également une notion importante que seul l’ordinateur
permet d’évaluer correctement. La navigation informatisée permet d’appréhender tout cela et
d’anticiper sur la nécessité ou non de faire un relâchement ligamentaire.
Nous n’avons pas besoin de reconstruire sur un écran le genou que l’on a sous les yeux.
1/ les temps préparatoires :
- étude du morphotype du genou sur les radiographies
- implantation de corps rigides fixes qui serviront de repères au système de détection , ces
corps rigides sont fixés dans le fémur et le tibia par des broches , ils sont munis de 3 ou plus
repères réfléchissants qui pourront être détectés par la caméra qui fournira leur positionnement à

l'ordinateur pendant toutes les phases de l'intervention . Ces corps rigides repères sont enlevés en
fin d'intervention.
- détermination du centre de la hanche par des mouvements imprimés sur l'ensemble du
membre inférieur . Ces mouvements sont analysés par la caméra au travers des variations des
corps rigides et le calcul informatique du centre de la tête fémorale sera ainsi fait et mémorisé .
- détermination des centres mécaniques du fémur et du tibia à l'aide d'un palpeur muni de
repères réfléchissants comme ceux des corps rigides .
- détermination de la forme du fémur et du tibia à l'aide du même palpeur il s'agit d'un
bone morphing ( forme de l'os ) plus ou moins important selon le logiciel employé .
- détermination du centre de la cheville à l'aide du même palpeur
l'ensemble de ces déterminations de points va fournir à l'ordinateur la connaissance du genou
opéré dans l'espace et quelles que soient les positions , l'ordinateur sera capable de donner les
variations dans les trois plans de l'espace .
2/ les temps de coupes :
les coupes osseuses , tibiale et fémorale, seront préparées à l'aide de guides de coupe eux même
reliés a un bloc de positionnement , muni d'un capteur à repères réfléchissants , qui va donner la
position de cette coupe dans les trois plans de l'espace et sur l'épaisseur de coupe .Quand le guide
de coupe a le positionnement idéal il sera fixé à l'os et la coupe réalisée.
Ces coupes effectuées seront à nouveau vérifiées par un bloc de positionnement muni de
capteurs qui se positionne sur la coupe faite , ce système étant aussi muni de repères
réfléchissants qui renseigneront l'ordinateur sur le positionnement dans l'espace après chaque
étape pour confirmer l'alignement et éviter les erreurs.
3/ implantation de la prothèse :
Avant la mise en place de la prothèse définitive , il est mis provisoirement une prothèse d'essai
dont le positionnement sera aussi contrôlé dans l'espace directement sur l'écran de l'ordinateur
avec ses variations selon les mouvements du genou dans les trois plans de l'espace à divers angles
de flexion entre 0° et 140° , le renseignement est donné à l'ordinateur par le positionnement des
corps rigides .
Cette dernière vérification faite , et si elle est satisfaisante , il sera alors mis en place la prothèse
définitive .
La fin de l'intervention ne diffère pas d'une intervention prothétique classique .
CONCLUSION
La chirurgie assistée par ordinateur doit contribuer à aider le chirurgien dans des domaines, où,
sans ce moyen, ses performances et sa reproductibilité ne sont pas optimales.
En chirurgie du genou, elle doit lui permettre de se repérer lorsque ces repères sont cachés,
inaccessibles ou trompeurs. Elle doit lui permettre d’atteindre les objectifs pré opératoires à
chaque intervention et non pas de temps en temps.
Les logiciels doivent être adaptés aux différents concepts de prothèses (conservation du LCP,
postéro stabilisée, 3e condyle ou came centrale) et aux différentes philosophies : priorité à l’axe,
priorité à la balance ligamentaire, priorité aux deux.
 6
6
1
/
6
100%