S23-a: ressources - Académie de Nancy-Metz

RESSOURCES
C'est quoi le cerveau d'un robot
mobile?
S23a
Thèmes de séquence 7) Programmer un objet : Comment embarquer de l’intelligence

RESSOURCES
C'est quoi le cerveau d'un robot
mobile?
S23a
Thèmes de séquence 7) Programmer un objet : Comment embarquer de l’intelligence
Microcontrôleur (extrait de : http://fr.wikipedia.org/)

RESSOURCES
C'est quoi le cerveau d'un robot
mobile?
S23a
Thèmes de séquence 7) Programmer un objet : Comment embarquer de l’intelligence
Un microcontrôleur est un circuit intégré qui rassemble les éléments essentiels d'un ordinateur : processeur,
mémoires (mémoire morte pour le programme, mémoire vive pour les données), unités périphériques et
interfaces d'entrées-sorties. Les microcontrôleurs se caractérisent par un plus haut degré d'intégration, une plus
faible consommation électrique (quelques milliwatts en fonctionnement, quelques nanowatts en veille), une
vitesse de fonctionnement plus faible (quelques mégahertz à quelques centaines de mégahertz[1]) et un coût
réduit par rapport aux microprocesseurs polyvalents utilisés dans les ordinateurs personnels.
Par rapport à des systèmes électroniques à base de microprocesseurs et autres composants séparés, les
microcontrôleurs permettent de diminuer la taille, la consommation électrique et le coût des produits. Ils ont
ainsi permis de démocratiser l'utilisation de l'informatique dans un grand nombre de produits et de procédés.
Les microcontrôleurs sont fréquemment utilisés dans les systèmes embarqués, comme les contrôleurs des
moteurs automobiles, les télécommandes, les appareils de bureau, l'électroménager, les jouets, la téléphonie
mobile, etc.
La plus grande partie des systèmes électroniques complexes utilisés de nos jours sont des systèmes embarqués :
téléphones mobiles, horloges, baladeurs, récepteurs GPS, électroménager, automobile, transport
aérien/maritime/fluvial. Les systèmes embarqués se démarquent des systèmes informatiques traditionnels selon
plusieurs aspects :
Ils sont soumis à des contraintes de taille (intégration), de consommation électrique (autonomie) et de
coût importantes (grande série) ;
Ils sont en général dédiés à une tâche bien précise. La taille des programmes et la quantité de mémoire
(vive et morte), dont ils disposent, sont modestes (face à un micro-ordinateur) ;
Ils doivent communiquer avec des dispositifs d'entrées-sorties (IO) : boutons, relais, résistances
variables, optocoupleurs, moteurs électriques, LED, circuits intégrés logiques, etc. ;
Ils n'ont parfois aucun dispositif d'interface homme-machine : ni clavier, ni écran, ni disque, ni
imprimante, etc. Par exemple, le contrôleur d'injection de carburant du moteur d'une automobile est
totalement invisible pour le conducteur.
LES SYSTEMES MICRO-PROGAMMES (article du Lycées E.Pérochon et J.Desfontaines, section Sciences de l'Ingénieur )
Les systèmes à microprocesseurs ou microcontrôleurs sont omniprésents dans la vie de tous les jours. On les
rencontre dans des systèmes complexes (ordinateurs individuels) mais également dans des systèmes simples
(machine à laver, pompe à essence, store automatique, ...) où leur grande souplesse est appréciée.
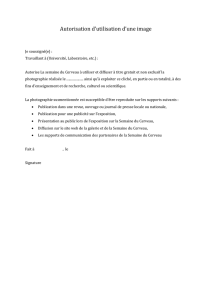
Unité de traitement électronique
Interfaçage
d'entrée Unité centrale de
traitement Interfaçage de
sortie
CAPTEURS
ACTIONNEUR
OPERATEUR
ORGANISATION FONCTIONNELLE D'UN SYSTEME A MICROCONTROLEUR"
Signaux analogique,
numérique et/ou logique
Signaux numériques traitésSignaux numériques à traiterSignaux analogique,
numérique et/ou logique
Un objet technique, intégrant de l’électronique, fait souvent apparaître des fonctions ayant pour rôle le
traitement d’informations : opérations arithmétiques (addition, multiplication...) ou logiques ( ET, OU...)
entre plusieurs signaux d’entrée permettant de générer des signaux de sortie.
Ces fonctions peuvent être réalisées par des circuits intégrés analogiques ou logiques. Mais, lorsque l’objet
technique devient complexe, et qu’il est alors nécessaire de réaliser un ensemble important de traitements
d’informations, il devient plus simple de faire appel à une structure à base de microcontrôleur.
Mémoires programmes :

RESSOURCES
C'est quoi le cerveau d'un robot
mobile?
S23a
Thèmes de séquence 7) Programmer un objet : Comment embarquer de l’intelligence
Ce dispositif contient les instructions du programme que doit exécuter le microprocesseur. Ce type de
mémoire (appelée mémoire morte), est uniquement accessible en lecture. Sa programmation nécessite une
procédure particulière et un matériel adéquate. Il en existe différents types selon leur mode de programmation
:
Les interfaces :
Les interfaces permettent de relier plusieurs constituants n’étant pas forcément compatibles entre eux. Cet
étage va donc réaliser une adaptation entre les différents signaux présents en entrée et en sortie. Par exemple
le microprocesseur peut donner l’ordre d’ouverture d’un vanne mais il ne dispose pas d’assez d’énergie pour
effectuer cette action. L’interface fournira l’énergie nécessaire.
Les périphériques :
Ce sont des organes extérieur au système microprogrammé. Sans périphériques, le système fonctionnerait
mais il ne servirait à rien puisqu’il n’échangerait aucune information avec l’extérieur. Parmi les périphériques
les plus connus, on peut citer : l’écran, le clavier, la souris, l’imprimante, les haut-parleurs, le scanner, la clé
USB, ...
Description et programmation de la tâche à accomplir
On définit dans le cahier des charges l’ensemble des commandes ou actions que doit réaliser le
microcontrôleur. Ces définitions sont données dans un ordre spécifique : il s’agit d’un fonctionnement
séquentiel. Avant d’en générer le code machine binaire compréhensible par le microcontrôleur, des étapes
intermédiaires sont nécessaires afin de réduire les risques d’erreurs et les difficultés. On fait d’abord
apparaître le cycle de fonctionnement à l’aide de deux représentations normalisées : l’algorithme et
l’algorigramme (voir cours sur les algorithmes). On peut ensuite écrire le programme associé en utilisant
différents langages :
Un langage assembleur spécifique au type du microprocesseur qui est traduit en code machine lors de
l’opération d’assemblage.
Un langage évolué (C, Pascal et Basic) utilisant des procédures adaptées au type de microprocesseur et
qui est traduit en code machine par une opération de compilation effectuée par un “Cross - compilateur”.
Un langage graphique (organigramme, ladder…) qui permet visuellement de voir le programme.

RESSOURCES
C'est quoi le cerveau d'un robot
mobile?
S23a
Thèmes de séquence 7) Programmer un objet : Comment embarquer de l’intelligence
Interface Robo TX Controller
Fischertechnik®
159,90 € HT
191,24 € TTC
Ref:FI500995
Cette interface est dotée d‘un processeur 32
bits, d‘un écran LCD, d‘une capacité mémoire
élevée et d‘un boîtier compact (90 x 90 x 15
mm).
Elle dispose de nombreuses possibilités de
montage et permet de rapporter des pièces sur
5 faces. Module radio « Bluetooth » intégré (2,4 GHz/portée
d‘environ 10 mètres). Le couplage de plusieurs « ROBO TX CONTROLLER » est possible.
Caractéristiques techniques
- Processeur 32 bits ARM 9 (200 MHz)
- Capacité mémoire : 8 Mo RAM, 2 Mo Flash
- Poids : rien que 90 g
- 8 entrées universelles : numérique/analogique - 0-9 Volts DC, analogique 0-5 kO
- 4 entrées de compteur rapides : numérique, - fréquence jusqu‘à 1 kHz
- 4 sorties moteur 9 Volts/250 mA : réglage progressif de la vitesse, protection contre les
courtscircuits,
alternative composée de 8 sorties individuelles
- 2 raccordements d‘extension : I2C et RS 485 pour le couplage avec d‘autres « ROBO TX
Controller »
- Ecran : 128 x 64 pixels, monochrome
- Interface USB : USB 2.0 (compatible 1.1), maxi 12 Mbit, y compris une douille USB
miniature
- Programmable avec le logiciel « ROBO Pro » ou « C-Compiler » (non fourni)
- Contient le câble de raccordement USB
- Equipement requis : Accu Set ou Power Set
Logiciel de programmation ;
 6
7
8
9
10
11
12
13
14
6
7
8
9
10
11
12
13
14
1
/
14
100%