Contrôles électro-hydrauliques: mise en route et

Contrôles électro-hydrauliques: mise en route et dépistage
des pannesd
Fiche F003-3/F
1SECTION HYDRAULIQUE
F003
Les paragraphes suivants fournissent quelques conseils et avertissements généraux sur les procédures à suivre pour garantir le bon fonctionnement d’un systè-
me électro-hydraulique se référant particulièrement aux circuits en boucle fermée des axes électro-hydrauliques modernes et de leurs composants proportion-
nels avec électronique intégrée ayant d’excellentes prestations. Pour avoir des informations plus détaillées sur les composants spécifiques, se reporter aux
fiches techniques correspondantes; nous recommandons de les consulter avant toute mise en route. Pour garantir le fonctionnement correct des composants
électro-hydrauliques, il faut respecter les prescriptions suivantes:
1.1 Nettoyage du réservoir et des tuyaux
1.2 Montage mécanique et connexions
1.3 Filtration
1.4 Drainage et lignes de retour
1.5 Fluide hydraulique
1.6 Conditionnement du fluide
1.7 Purges d’air
2SECTION ELECTRONIQUE
2.1 Alimentation
2.2 Câblages électriques
2.3 Suppression des perturbations électri-
ques
2.4 Utilisation des signaux de service
2.5 Calibrages électroniques
2.6 Température et milieu de travail
1.1
Nettoyage du réservoir et des tuyaux
Le réservoir du fluide doit être soigneusement
nettoyé et être exempt d’objets étrangers à
l’intérieur; les conduites doivent être cintrées à
froid, ébavurées et décapées. Après l’assem-
blage complet, pour éliminer tout agent de
contamination, il faut laver totalement les con-
duites; pendant cette opération, les valves pro-
portionnelles sont enlevées et remplacées par
des connexions de dérivation.
1.2 Montage mécanique et connexions
Les calibrages mécaniques des capteurs sur
les valves et sur les actionneurs ne doivent pas
être modifiés car tous les composants sont
tarés à l’usine. Si un tarage personnalisé est
requis sur les valves, il faut consulter attentive-
ment les fiches du produit et suivre toutes les
indications fournies.
Si des conduites flexibles sont requises, utiliser
le type blindé, à condition qu’elles ne se trou-
vent pas entre la valve et le capteur; elles peu-
vent être montées sur les lignes sous pression
entre la centrale et la valve proportionnelle, ou
sur les lignes de retour des valves proportion-
nelles.
La valve proportionnelle doit être montée aussi
près que possible de l’actionneur pour garantir
les prestations dynamiques maximum.
1.3 Filtration
La classe de contamination du fluide doit
être conforme à ISO 18/15 obtenues par des
filtres de 10µm et β10=75 sur les lignes sous
pression.
Le code 18/15, suivant la norme ISO 4406,
définit le nombre de particules solides conta-
minantes ayant un diamètre de 5÷15µdans
1 ml de fluide; plus précisément, cela signifie
qu’il y a de 1300 à 2500 particules supérieu-
res à 5µ et de 160 à 320 particules supérieu-
res à 15µdans 1 ml de fluide.
Autant que possible les filtres en ligne doi-
vent être montés immédiatement avant les
valves proportionnelles; l’élément filtrant est
de type à haute pression de rupture avec
indicateur électrique de colmatage, sans cla-
pet de by pass.
Pendant le lavage, l’élément filtrant doit être
à basse pression; après le lavage, les élé-
ments filtrants seront remplacés par des élé-
ments à haute pression; avant d’installer les
valves proportionnelles, on peut effectuer un
autre lavage (durée 15 minutes) avec ces
éléments filtrants. Après cette opération, ces
éléments et les accessoires de lavage ne
doivent plus être utilisés s’ils sont encrassés.
Pour monter les raccords sur les embases,
utiliser du ruban en teflon; il faut faire particu-
lièrement attention afin d’éviter que des mor-
ceaux de teflon ne pénètrent dans le fluide
quand les raccords sont vissés.
Il faut considérer également les avertisse-
ments suivants:
- vérifier les filtres qui doivent avoir les
dimensions exactes pour en garantir l’effi-
cacité;
- La plus grande source de contamination
d’un système hydraulique est l’air
1SECTION HYDRAULIQUE
LIGNES
ÉLECTRIQUES
LIAISONS
HYDRAULIQUES
UNITÉ DE CONTROLE
PRINCIPALE
E-ME-K-PID E-RI-TE-01H
ALIMENTATION 24VDC
+
-
V+
V-
SET-POINT IN +
SET-POINT IN -
MONITEUR RETRO-ACTION
TRASDUTEUR DE
RETRO-ACTION
N. FERME
COMM.
N. OUVRE
RETRO-ACTION
ABILITATION
ALIMENT. +24 VDC
ALIMENT. ZERO
SIGN. D’ ALARME
CONSIGNE +
CONSIGNE -
CARACTÉRISTIQUES DES CONTACTS
PUISSANCE MAXI 3W
ECHELLE
PROTECTION
ZERO
MONITEUR
ALARME
RETRO-ACTION
100V
0.25A
TENSION MAXI
COURANT MAXI
Atos Hydraulique S.a.r.l.
69628 Villeurbanne Cedex, France - Fax 04.78.79.53.24

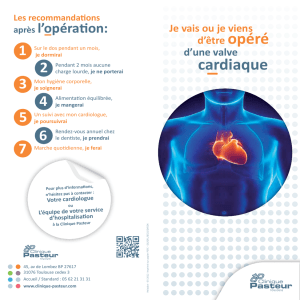
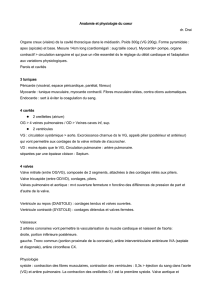
dessous):
- alimentation à partir de batterie; les sur-
tensions (typiquement supérieures à 34 V)
endommagent les circuits électroniques;
on recommande d’utiliser des filtres et des
écrêteurs de tension;
- alimentation AC redressée; la valeur
moyenne Vrms doit être comprise entre 21
et 28V, avec un condensateur sur l’ali-
mentation égal à 10000 µF/3A de courant
prévu quand on utilise une alimentation
monophasée; 4700 µF quand on utilise
une alimentation triphasée.
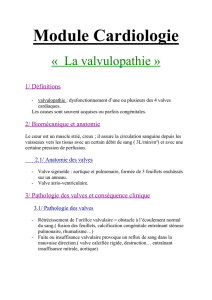
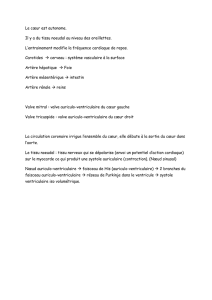
2.2 Câblages électriques
Les câbles d’alimentation de puissance
(bobines, platines électroniques ou autres
charges) doivent être séparés des câbles de
contrôle (signaux de référence et de rétroac-
tion, masse) pour éviter des interférences.
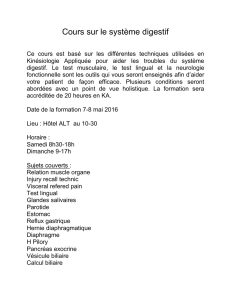
Les câbles électriques des signaux électro-
niques doivent être blindés (voir la première
page) par le biais d’écrans ou de gaines rac-
cordées à la masse (suivant CEI 11-17)
Les sections des câbles recommandées
sont les suivantes;
- Alimentation et masse: 0,75 mm2;
- Bobines: 1mm2(Lmaxi = 20 m); 1,5 mm2
(pour des longueurs supérieures) type
blindé;
- référence en tension et rétroaction de
LVDT: 0,25mm2(Lmax = 20m) type blindé;
Note:
il faut prévoir des signaux en courant quand
on utilise des longueurs supérieures pour les
raccordements des signaux de consigne et
de rétroaction ;
on peut prévoir des unités électroniques et
des capteurs appropriées ou des convertis-
seurs de tension en courant:
- Signaux de service: 0,25mm2(Lmax = 20 m)
type blindé;
- Capteurs électroniques: 0,25mm2(Lmax =
20 m) type blindé;
2.3
Supression des perturbations électriques
A la mise en route du système, on recom-
mande de contrôler les masses des signaux
de rétroaction et de consigne qui doivent
être exemptes d’interférences et de pertur-
bations électriques pouvant influencer les
caractéristiques du signal et provoquer
l’instabilité de tout le système.
Les perturbations électriques sont de fortes
oscillations, instables en amplitude et en fré-
quence autour de la valeur moyenne du
signal; ils peuvent être éliminés en blindant
les câbles des signaux et en les mettant à la
masse.
La plupart des perturbations électriques sont
dues à des champs magnétiques extérieurs
générés par des transformateurs, des
moteurs électriques, des disjoncteurs, etc.
2.4 Utilisation des signaux de service
- Contact d’autorisation
Les platines électroniques Eurocard peu-
vent être inibées dans les conditions
d’urgence ou en cas de nécessité en met-
tant à zéro le signal d’autorisation qui
coupe le courant à la valve. Pendant le
fonctionnement vérifier que ce contact soit
toujours alimenté (de 5 à 33 VDC).
- Conditions de fail-safe
S’il n’y a pas de signal de rétroaction à
cause d’un court-circuit ou d’une interrup-
tion dans le cablage du capteur, une
interdiction automatique de la platine de
contrôle entre en fonction (E-ME-T*; E-ME-
K-PID) et le courant fournit aux valves
échangé avec l’extérieur du réservoir; il
faut toujours introduire des filtres pour
l’air.
- filtrer le fluide en remplissant le réservoir
(le nouveau fluide est souvent contaminé)
avec le groupe filtrant GL-15 (fiche L150)
ou similaire.
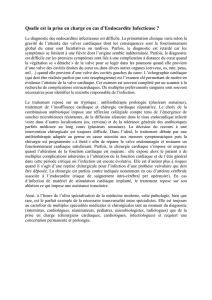
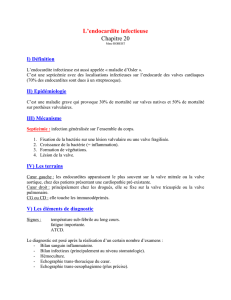
1.4 Drainage et lignes de retour
La fonction des drainages est essentielle
dans tous les systèmes, car ils servent à la
définition du niveau de la pression de réfé-
rence. Ils doivent être raccordés au résevoir
sans contre-pression. Sur le côté de la tige
des servo-vérins se trouve une chambre de
drainage, voir la figure ci-dessous:
La ligne de retour d’une valve proportionnel-
le au réservoir a une section interne appro-
priée pour éviter la contre-pression sur le
système hydraulique; il est donc préférable
d’utiliser une ligne de retour raccordée direc-
tement au réservoir plutôt que d’acheminer
le fluide dans un autre tube.
1.5 Fluide hydraulique
Utiliser exclusivement des fluides de bonne
qualité suivant DIN 51524...535, avec un
indice de viscosité élevé. La viscosité
recommandée est 15÷100 mm2/sec à
40°C.Quand la température du fluide dépas-
se 60˚C, choisir des joints en Viton; de toute
façon, la température du fluide ne doit pas
dépasser 80˚C.
1.6 Conditionnement du fluide
Un système ayant de hautes prestations doit
être conditionné thermiquement pour agir
dans une plage limitée de température du
fluide (généralement comprise entre 40 et
50˚C) afin que sa viscosité reste constante
pendant le fonctionnement.
Le cycle de fonctionnement doit commencer
après avoir atteint la température prescrite.
1.7 Purges d’air
L’air dans les circuits hydrauliques influence
la rigidité hydraulique et provoque les
dysfonctionnements. Des purges sont pré-
vues dans les valves proportionnelles et
dans les servovérins; sur les points d’accu-
mulation éventuelle du système hydraulique,
il faut introduire des valves de purge.
Il faut considérer également les mesures sui-
vantes :
- au moment de la mise en route du systè-
me, toutes les purges doivent être ouver-
tes pour permettre l’évacuation de l’air.
Pour les servo-vérins en particulier, vérifier
la purge de la chambre du capteur en
desserrant la valve de purge à l’extrémité
de la tige;
- pour les tuyaux desserrer les connexions;
- le système est purgé à la première mise
en route ou en cas d’entretien;
- utiliser un clapet anti-retour préchargé
(ex. à 4 bar) sur la ligne générale de
retour au réservoir pour éviter que les
conduites ne se vident en cas d’arrêt pro-
longé.
2.1 Alimentation
Les valeurs de tension doivent être compri-
ses dans la plage suivante (en fonction du
dispositif d’alimentation):
tension stabilisée : V = 24 VDC
tension filtrée et redressée: Vrms = 21÷33 V
(Perturbation maxi. = 2 Vpp)
Le dispositif d’alimentation doit être dimen-
sionné pour produire la tension correcte
quand tous les services exigent le courant
maxi. au même moment; généralement, on
peut considérer, pour chaque valve ali-
mentée, 50 W de puissance électrique maxi.
à l’entrée.
Il faut également tenir compte des notes
supplémentaires suivantes (voir figure ci-
REDRESSEUR
prends la valeur zéro. En même temps, la
condition d’urgence est signalée par une
LED sur la face avant; le signal d’interdic-
tion est également disponible sur un con-
tact pour indiquer à distance l’état
d’urgence du système.
- Signal d’axe en position
Sur la platine (E-ME-K-PID) sont disponi-
bles un contact d’axe en position (Ax.
Pos.) et un contact pour l’actionneur
arrêté (F.ERR). Ces contacts peuvent être
utilisés en tenant compte des indications
suivantes:
• une perturbation électrique excessive
peut provoquer de faux contacts et
empêcher le fonctionnement des
signaux susmentionnés.
• en cas de vitesses de translation extrê-
mement basses, le contact d’axe en
position est toujours allumé.
- Signal d’alarme et signal du moniteur
Quand les platines électroniques sont
montées sur la valve (type AE, TE) un
signal d’alarme est disponible pour indi-
quer le fonctionnement correct de la valve
(sortie à 24 V) ou une anomalie en cours
(0 V); un signal de sortie (0÷5V,± 10V) est
disponible pour contrôler la position du
tiroir de la valve. Ces deux signaux peu-
vent être raccordés à l’unité de contrôle
principale pour les séquences de fonc-
tionnement et pour le diagnostic.
Note: les signaux électriques prélevés
dans l’électronique de la valve (ex. le
signal de rétroaction) ne doivent pas être
utilisés pour provoquer l’arrêt de sécurité
de la machine. Ce qui est conforme à la
règlementation européenne (recomman-
dation de sécurité des systèmes et com-
posant utilisant la technologie à fluide -
hydraulique).
2.5 Calibrages électroniques
Les valves avec électronique intégrée, type
ZO-TE et ZOR-TE n’ont pas besoin de cali-
brage de la part de l’utilisateur final, car ces
opérations ont déjà été accomplies avant
l’expédition du composant (les valves avec
électronique intégrée sont de plus en plus
utilisées grâce à leur utilisation simple et leur
excellente fiabilité).
Toutefois, on peut régler le BIAS pour per-
mettre la régulation entre le zéro électrique
de référence et la position centrale du tiroir
(actionneur en position de repos); on peut
effectuer un nouveau calibrage en cas de
conditions hydrauliques spéciales (par
exemple un vérin ayant un rapport différen-
tiel élevé et/ou des commandes ayant un ∆p
élevé).
Quand on installe dans l’unité de contrôle
des platines électroniques en format
Eurocard ou autres, les procédures de mise
au point sont indiquées sur les fiches techni-
ques correspondantes; il faut les consulter
attentivement avant d’effectuer la mise en
route.
En cas d’exigences particulières, on peut
effectuer des calibrages personnalisés en
collaboration avec les techniciens Atos.
2.6 Températures et environnement
Il faut toujours contrôler le milieu de travail
qui doit être compatible avec les données
fournies par la fiche technique du produit. Le
cas échéant, conditionner le tableau électri-
que ou vérifier s’il faut utiliser des compo-
sants résinés ou protégés spécialement.
En particulier, on ne peut pas installer l’élec-
tronique intégrée quand la température
ambiante dépasse 50˚C ou est inférieure à
0˚C; dans ces cas, il faut prévoir une électro-
nique séparée.
2SECTION ELECTRONIQUE
ALIMENTATION TRIPHASEE REDRESSEE ET FILTREE
ALIMENTATION MONOPHASEE REDRESSEE ET FILTREE
ALIMENTATION EN COURANT CONTINU
TRANSFORMATEUR
TRANSFORMATEUR
REDRESSEUR
FILTRE
ECRETEUR ECRETEUR DE
SUR-TENSION
DRAINAGE
1/8” G

CAUSES DES PANNES
Mécaniques/hydrauliques Electriques/Electroniques
PROBLEMES CAUSES DES PANNES
Mécaniques/hydrauliques Electriques/Electroniques
3TABLEAU DE DEPISTAGE DES PANNES
3.1 Applications en boucle ouverte
Pour reconnaître une panne et trouver le composant défectueux dans un système électro-hydraulique, il faut avoir une bonne collaboration entre les
techniciens électroniques et hydrauliques.
Pour analyser le système il faut non seulement connaître les fiches techniques de chaque composant, mais également évaluer le schéma hydraulique et
le schéma électrique concernant le cycle de fonctionnement.
Il ne s’agit pas d’une solution infaillible pour dépister les pannes à cause de la nature complexe des systèmes électro-hydrauliques; toutefois, les
tableaux suivants représentent un bon point de départ.
Notes:
- la plupart des problèmes peuvent se résoudre en remplaçant sur place le composant défectueux. Les composants défectueux sont généralement
réparés par le constructeur.
- Les tableaux suivants ne considèrent pas les pannes provoquées par la conception du système.
3.2 Applications en boucle fermée-conditions statiques
PROBLEMES
Mouvement instable de l’axe
(oscillations de pression et/ou de débit)
Extra course de l’actionneur
Axes avec des mouvements à secousses
non contrôlables
Bruit excessif
Pompe défectueuse.
Air dans le circuit.
Fluide contaminé
Pression de pilotage insuffisante dans les valves à double
étage.
Mouvement par secousses dû à un frottement excessif des
joints du vérin
Vitesse inférieure au minimum pour le moteur hydraulique
Puissance insuffisante de l’alimentation électrique.
Signaux perturbés-mauvais raccordement à la
masse ou mauvais blindage
Perturbations électriques ou électromagnétiques
causées par l’excitation du solénoïde.
Conduites trop élastiques
Valve d’arrêt qui ne ferme pas immédiatement
Purge insuffisante de l’actionneur
Fuites internes dans l’actionneur
Courant de BIAS trop élevé
Temps de rampe trop long
Extra course de la butée de fin de course
Commutation trop lente
Pompe défectueuse
Valve de contrôle bloquée (encrassée)
Valves et régulations manuelles sur une position incorrecte
Erreur de Câblages. Contacts qui ne permettent pas
la continuité électrique. Dispositifs de signalisation
faussés ou défectueux. Coupure de l’alimentation
électrique et/ou du signal de consigne
Capteurs faussés mécaniquement
Commande trop lente
Forces et couples insuffisants
Fuites internes dans la pompe dues à l’usure
Valve de contrôle du débit réglée trop basse
Résistance excessive dans les lignes de retour et d’alimentation.
Pression de fonctionnement des valves de contrôle réglée trop
basse. Perte excessive de charge aux extrémités des valves de
contrôle Fuites internes de la pompe et des valves dues à l’usure
Coups de bélier pendant le
fonctionnement
Temps de commutation des valves de contrôle trop rapide.
Etrangleurs ou orifices endommagés
Aucun étranglement avant le système accumulateur
Forces et masses excessives appliquées à l’actionneur
Signal de consigne incorrect
Réglage d’échelle incorrect
Temps de rampe trop bref
Température de fonctionnement excessive Section des conduites insuffisante
Alimentation continue excessive
Pression réglée trop haut
Système de refroidissement interrompu
Venting interrompu pendant les intervalles
Filtres encrassés.
Formation de mousse dans le fluide
Ralentissement de la pompe ou du moteur
Résistance excessive dans la ligne d’aspiration
Bourdonnement des valves de contrôle
Air dans le solénoïde des valves
Réglage du dither incorrect
Oscillations à basse
fréquence
Force
Vitesse
Position
VALEUR REELLE
VALEUR PROGRAMMEE Alimentation hydraulique insuffisante
Pression de pilotage insuffisante
Valve défectueuse à cause de l’usure ou icras-
sés
Gain proportionnel programmé trop
bas
Gain intégral programmé trop bas
Temps d’échantillonnage trop long
Vibrations à haute fréquence
Force
Vitesse
Position
VALEUR PROGRAMMEE
VALEUR REELLE
Formation de mousse dans le fluide
Valve défectueuse à cause de l’usure ou
icrassés
∆de pression élevée dans la valve
Air dans le solénoïde de la valve
Gain proportionnel programmé trop
haut
Perturbations électriques
Crête de brève durée dans une
ou deux directions
Force
Vitesse
Position
VALEUR PROGRAMMEE
VALEUR REELLE
Accouplements mécaniques non rigides
Air dans le solénoïde de la valve
Valve défectueuse à cause de l’usure ou
icrassés
Courant de BIAS incorrect
Perturbations électromagnétiques
Oscillations auto-amplifiées
Force
Vitesse
Position
VALEUR PROGRAMMEE
VALEUR REELLE Conduites trop élastiques
Accouplement mécanique non rigide
∆de pression élevé dans la valve
Gain hydraulique élevé dans la valve
Gain proportionnel trop élevé
Gain intégral trop élevé
Signal de consigne incorrect
Réglage d’échelle incorrect

Retard
Connexion précaire du capteur de rétroaction
Conduites trop élastiques
Air dans le solénoïde de la valve
Jeu
CAUSES DES PANNES
Mécaniques/Hydrauliques Electriques/Electroniques
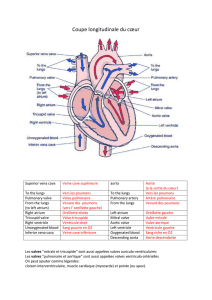
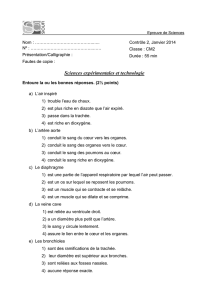
3.3 Applications en boucle fermée - conditions dynamiques : réponse graduelle
PROBLEMES
3.4 Applications en boucle fermée - conditions dynamiques : réponse en fréquence
CAUSES DES PANNES
Mécaniques/Hydrauliques Electriques/Electroniques
PROBLEMES
05/02
Extra course dans une direction
VALEUR PROGRAMMEE
VALEUR REELLE
∆de pression élevé dans la valve Gain dérivé programmé trop bas
Temps de rampe introduit
Extra course dans les deux direc-
tions VALEUR PROGRAMMEE
VALEUR REELLE
Accouplement mécanique non rigide
Conduites trop élastiques
Valve de contrôle montée trop loin de l’action-
neur
Gain proportionnel programmé trop
bas
Gain intégral programmé trop bas
Approche lente vers le point
programmé VALEUR PROGRAMMEE
VALEUR REELLE
Gain de pression de la valve de contrôle trop
bas
Gain proportionnel programmé trop
bas
BIAS incorrect
VALEUR PROGRAMMEE
VALEUR REELLE
Actionneur n’atteignant pas le
point programmé
Pression ou débit insuffisantes
Capteur de rétroaction faussé
mécaniquement
Absence de puissance hydraulique
Gain intégral programmé trop haut
Echelle et BIAS incorrects
Gain dérivé et proportionnel pro-
grammés trop bas
Contrôle instable
Contrôle interdit
Mauvaise répétibilité et fort
hystérésis
VALEUR REELLE
Force
Vitesse
Position
VALEUR REELLE
Connexion précaire du capteur de rétroaction
Gain proportionnel programmé trop
haut
Gain intégral programmé trop bas
Perturbations électriques
Absence de puissance électrique
Absence de référence ou de rétroac-
tion
Erreur de Câblage
Gain proportionnel programmé trop
haut
Gain intégral programmé trop bas
Amplitude trop faible
Amplification du signal
Instabilité et vibrations
VALEUR PROGRAMMEE
VALEUR PROGRAMMEE
VALEUR PROGRAMMEE
VALEUR REELLE
Force
Vitesse
Position
VALEUR PROGRAMMEE
Pression et débit insuffisantes Gain proportionnel trop bas
Réglage d’échelle trop bas
Conduites trop élastiques
Valve de contrôle éloignée de l’actionneur
Réglage d’échelle incorrect
Pression et débit insuffisants Temps de rampe introduit
Gain dérivé programmé trop haut
Air dans le solénoïde de la valve Gain proportionnel trop haut
Perturbations électriques
Gain dérivé programmé trop haut
VALEUR PROGRAMMEE
VALEUR PROGRAMMEE
VALEUR
PROGRAMMEE
Force
Vitesse
Position
Force
Vitesse
Position
Force
Vitesse
Position
Force
Vitesse
Position
Force
Vitesse
Position
Force
Vitesse
Position
Force
Vitesse
Position
Force
Vitesse
Position
Force
Vitesse
Position
VALEUR REELLE
VALEUR REELLE
VALEUR REELLE
VALEUR REELLE
1
/
4
100%