Barrière de parking Gestion par API

!"#$%&'()*(&(+*$
,*-$-.-)/0*-$
1234')*+5(6267'*!
!"##$%#&'(&')"#*$+,'
-&./$0+')"#'123'
!
!
!
8&44'*4*9:&4;'(7<,6+$1&7*$=$-34$=>$
2#4.&+/"/$0+'(5'.6./%7&'
$
?*$"<1<$+6(-)')3*$3($4&::*2$,*$:4674&00&)'6($,@3($A1B$"#C$DE<$FG*$267'+'*2$,*$:4674&00&)'6($3)'2'-H$I$1GE:46J<$
FK6)'6(-$&864,H*-$I$+60:)&7*L$)*0:64'-&)'6(L$4&++64,*0*()$,*-$*()4H*-$-64)'*-L$:&7*-$,@*M:26')&)'6(-J$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
Carte magnétique
Sens du déplacement des
véhicules
Vue de dessus :
H2 = rouge
H1 = vert

!"#$%&'()*(&(+*$
,*-$-.-)/0*-$
1234')*+5(6267'*!
!"##$%#&'(&')"#*$+,'
-&./$0+')"#'123'
!
!
!
8&44'*4*9:&4;'(7<,6+$1&7*$N$-34$=>$
$
$
$
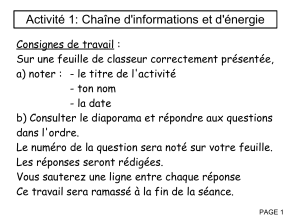
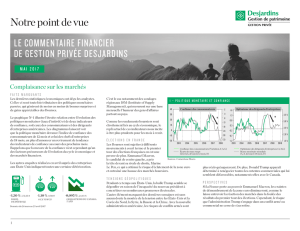
8"9$&#'(&.':9"#,&.';0+:/$0++&<'
O($&))*()*$,*$PH5'+32*L$2&$8&44'/4*$*-)$Q*40H*$*)$2*$Q*3$*-)$4637*<$
O()4H*$,*$PH5'+32*-$,&(-$2*$:&4;'(7$I$
G64-R3S3($PH5'+32*$-*$:4H-*()*$T$2S*()4H*$,3$:&4;'(7$F+&:)*34$U&U$&+)'6((HJL$2*$+6(,3+)*34$+600&(,*$2S63P*4)34*$,*$
2&$8&44'/4*$T$2S&',*$,*$-&$+&4)*$0&7(H)'R3*<$V(*$Q6'-$2&$8&44'/4*$63P*4)*$2*$Q*3$4637*$-SH)*'()$*)$2*$P*4)$-S&2230*<$W*3M$
+&-$-*$:4H-*()*()$I$
- =>"5/070?$<$./&'')"..&<$A:4/-$2*$:&--&7*$,3$PH5'+32*$I$W/-$R3*$2*$PH5'+32*$(S&+)'6((*$:23-$2*$+&:)*34$U&UL$2*$Q*3$
P*4)$-SH)*'()$*)$2*$Q*3$4637*$-S&2230*<$
- $$W/-$R3*$U8U$(S*-)$:23-$&+)'6((HL$6($+60:)&8'2'-*$2*$PH5'+32*$:3'-$2&$8&44'/4*$-*$4&8&'--*<$$
- =>"5/070?$<$./&''+&')"..&')".<$A3$863)$,*$X$-*+6(,*-$2&$8&44'/4*$-@&8&'--*L$'2$Q&3)$&264-$4*:4H-*()*4$3(*$+&4)*$
:634$Q4&(+5'4$2&$8&44'/4*<$
$
G&$8&44'/4*$,6')$:63P6'4$Q6(+)'6((*4$R3*22*$R3*$-6')$2&$26(73*34$,3$PH5'+32*$F'2$*-)$-63-9*()*(,3$R3*$2*-$+&:)*34-$U&U$
*)$U8U$:*3P*()$Y)4*$&+)'6((H-$*($0Y0*$)*0:-L$0&'-$H7&2*0*()$:*3P*()$(*$:&-$Y)4*$&+)'6((H-$*($0Y0*$)*0:-$,&(-$
2*$+&-$,S3($PH5'+32*$,*$Q&'82*$26(73*34J<$
$
V(*$ Q6'-$ +'(R$ PH5'+32*-$ :&--H-$ '2$ (@*-)$ :23-$ :6--'82*$ ,@&++H,*4$ &3$ :&4;'(7<$ Z($ :*3)$ )63)*Q6'-$ 4*0*))4*$ T$ [H46$ 2*$
+60:)*34$:&4$3($!<1<$4&[+60:)*34<$
#64)'*$,*$PH5'+32*-$I$
$
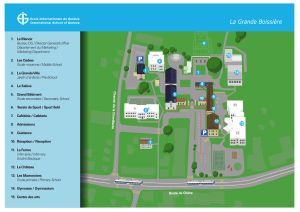
Lecteur carte « c »
Barrière
Barrière unidirectionnelle au sol (à
écrasement dans un sens, capteur
« g »)
Zone parking
« b »
« s »
Entrée
Sortie

!"#$%&'()*(&(+*$
,*-$-.-)/0*-$
1234')*+5(6267'*!
!"##$%#&'(&')"#*$+,'
-&./$0+')"#'123'
!
!
!
8&44'*4*9:&4;'(7<,6+$1&7*$D$-34$=>$
#64)'*-$,*$PH5'+32*-$,3$:&4;'(7$I$,H+60:)&7*$,*$?=$264-$,*$2&$:4H-*(+*$,@3($PH5'+32*$*)$,3$Q46()$,*-+*(,&()$,*$$U-U<$
Z($(*$)4&')*$:&-$2*$74&Q+*)$,*$2&$8&44'/4*$,*$-64)'*<$
$
@#"A"$<'(&7"+(4'B'
$
\H&2'-*[$2*F-J$74&Q+*)F-J$,*$:46,3+)'6($(640&2*$,3$-.-)/0*$*($4*-:*+)&()$2*$+&5'*4$,*-$+5&47*-$,6((H$:&7*$
:4H+H,*()*<$
$
\H&2'-*[$2*-$&QQ*+)&)'6(-$,*-$*()4H*-$*)$,*-$-64)'*-$(H+*--&'4*-<$F-34$Q*3'22*-$]6'()*-J$
$
K6)&$I$2*-$*()4H*-$-6()$4*:H4H*-$^B.<C$*)$2*-$-64)'*-$^_.<CL$6`L$a$$.$b$+644*-:6(,$T$2@*0:2&+*0*()$:5.-'R3*$*)$,*$2&$
+&4)*$*)$a$C$b$*-)$2*$(30H46$,*$2@*()4H*$63$,*$2&$-64)'*$+6(+*4(H*<$
\H&2'-*4$2*$-+5H0&$,*$+c82&7*$,*$2@*(-*082*$-&+5&()$R3*$I$
&L$*-)$3($+&:)*34$T$8&44&7*$,6()$2&$4HQH4*(+*$*-)$I$CV!$NA1!K%=N\$
8L$*-)$3($+&:)*34$T$8&44&7*$,6()$2&$4HQH4*(+*$*-)$I$CV!$NA1AK%=N\$
$
$86L$8QL$+L$-L$7$,*-$+6()&+)-$KZ$-*+-<$
G&$+&4)*$*()4H*$-64)'*$,*$2@&3)60&)*$*-)$3(*$"#C$W%d$NeW\<$
$
$
OQQ*+)3*[$2&$:4674&00&)'6($T$2@&',*$,3$267'+'*2<$
- #H2*+)'6((*[$2&$86((*$8&-*$A1B$,&(-$2*$0*(3$I$+6(Q'734&)'6(<$
- Z($3)'2'-*$2&$)*0:64'-&)'6($"=$*)$2*$+60:)*34$?=$,6()$6($:6344&$+60:&4*4$2&$P&2*34$+634&()*$&P*+$2*$(6084*$
,@&++/-$&3)64'-H-<$
- WHP*26::*4$3(*$)",&'4:#"+'(C&D)<0$/"/$0+$:*40*))&()$,*$P'-3&2'-*4$2*$+6()*(3$,3$+60:)*34$*)$2&$:6-')'6($,*$2&$
8&44'/4*$,@*()4H*<$FP63-$:63P*[$&3--'$&]63)*4$3(*$+600&(,*$0&(3*22*$,*-$+&:)*34-$:634$-'032*4$2*$
Q6(+)'6((*0*()J$
- #&3P*7&4,*[$P6)4*$)4&P&'2$-63-$2&$Q640*I$a$:&4;9(60<-)M$b<$
- ?6((*+)*[9P63-$T$2@A1B<$
- %*))*[$2@A1B$*($\VK<$
- "*-)*[$P6)4*$:4674&00*<$
- A::*2*[$2*$:46Q*--*34$:634$P&2',*4$P6)4*$)4&P&'2<$
$
$
E0:57&+/.'#4)0+.&.'
$
O()4H*-$
$
4*:/4*$
&$
8$
!6$$
F8&44'/4*$
63P*4)*J$
!Q$
F8&44'/4*$
Q*40H*J$
?$
F2*+)*34$,*$
+&4)*J$
-$
7$
\&[$
AQQ*+)&)'6($
A1B$
^<<<$
$
$
$
$
$
$
$
".:*$,*$
+6()&+)$
$
$
KZ$
$
$
$
$
$
"*+5(6267'*$
$
$
"Z\$
$
$
$
$
$
$
$
#64)'*-$
$
4*:/4*$
f*3$P*4)$
f*3$4637*$
%6()H*$
W*-+*()*$
$
$
$
AQQ*+)&)'6($A1B$
^<<<$
$
$
$
$
$
$
\*2&'-g?6()&+)*34$
h=$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$

!"#$%&'()*(&(+*$
,*-$-.-)/0*-$
1234')*+5(6267'*!
!"##$%#&'(&')"#*$+,'
-&./$0+')"#'123'
!
!
!
8&44'*4*9:&4;'(7<,6+$1&7*$i$-34$=>$
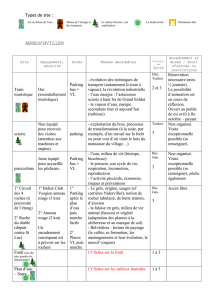
-#";:&/.')0$+/'(&'A5&')"#/$&'0)4#"/$A&'F&+'5/$<$."+/'<&'+07'(&.':")/&5#.'&/'(&.')#4'":/$0++&5#.'B'?G'"G':G'HIJKLM'
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
@#"+.$/$0+.'&/'4N5"/$0+.'(&'.0#/$&.'&+'="((&#''FA05.'5/$<$.&O'<&.'";;&:/"/$0+.'123':90$.$&.M'
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$

!"#$%&'()*(&(+*$
,*-$-.-)/0*-$
1234')*+5(6267'*!
!"##$%#&'(&')"#*$+,'
-&./$0+')"#'123'
!
!
!
8&44'*4*9:&4;'(7<,6+$1&7*$X$-34$=>$
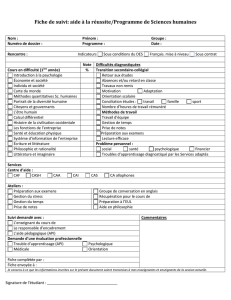
P:947".'(&':Q?<",&'
$
4
3051-FR_Ver5.1.fm/12
Raccordements (suite) Plate-forme d’automatisme
Modicon TSX Micro 1
Modules d’entrées/sorties “Tout ou Rien”
TSX DEZ 08A4/08A5 TSX DSZ 08T2K TSX DSZ 08T2
TSX DEZ 28DTK TSX DMZ 28DT TSX DMZ 28DR
Logique positive (Sink)
Logique négative (Source) :
+ 24 V = borne 17
- 24 V = borne 18 = commun
(1) Fusible 0,5 A à fusion rapide
(2) Fusible 6,3 A à fusion rapide
(3) Fusible à fusion rapide, à calibrer selon la
charge
2
4
3
6
8
12
14
10
5
7
11
13
9
15
1
(1)
0
2
4
6
1
3
5
7
Capteurs Entrées
2
43
6
8
12
14
10
5
7
11
13
9
20
19
16
15
17 18
1
(2)
24 V
2
4
6
1
3
5
7
0
Préactionneurs
Sorties
2
4
3
6
8
12
14
10
5
7
11
13
9
15
1
(2)
0
2
4
6
1
3
5
7
24 V
Préactionneurs Sorties
A
2
43
6
8
12
14
10
5
7
11
13
9
20
19
16
15
17 18
1
(1)
0
2
4
6
8
10
1
3
5
7
9
11
12
14
13
15
24 V
B
2
43
6
8
12
14
10
5
7
11
13
9
20
19
16
15
17 18
1
(2)
24 V
2
4
6
1
3
5
7
0
8
9
10
11
Capteurs Entrées
Préactionneurs
Sorties
2
4
3
6
8
12
14
16
10
5
7
11
13
9
15
1
(1)
0
2
4
6
1
3
5
7
8
9
10
11
12
13
14
15
18
20
19
22
24
28
30
26
21
23
27
32
33
34
35
29
25
31
17
(2)
0
3
5
7
2
4
6
8
1
9
11
10
24 V
24 V
Préactionneurs
Sorties
Capteurs Entrées
2
4
3
6
8
12
14
16
18
10
5
7
11
13
9
15
17
10
2
4
6
1
3
5
7
8
10
12
14
9
11
13
15
20
22
21
24
26
30
32
34
28
23
25
29
31
27
33
35
19
(3)
(3)
(3)
(3)
19É240 V
24 V
0
1
3
2
4
5
7
6
8
10
9
11
(1) 24 V
Capteurs Entrées
Préactionneurs
Sorties
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
$
4
3051-FR_Ver5.1.fm/12
Raccordements (suite) Plate-forme d’automatisme
Modicon TSX Micro 1
Modules d’entrées/sorties “Tout ou Rien”
TSX DEZ 08A4/08A5 TSX DSZ 08T2K TSX DSZ 08T2
TSX DEZ 28DTK TSX DMZ 28DT TSX DMZ 28DR
Logique positive (Sink)
Logique négative (Source) :
+ 24 V = borne 17
- 24 V = borne 18 = commun
(1) Fusible 0,5 A à fusion rapide
(2) Fusible 6,3 A à fusion rapide
(3) Fusible à fusion rapide, à calibrer selon la
charge
2
4
3
6
8
12
14
10
5
7
11
13
9
15
1
(1)
0
2
4
6
1
3
5
7
Capteurs Entrées
2
43
6
8
12
14
10
5
7
11
13
9
20
19
16
15
17 18
1
(2)
24 V
2
4
6
1
3
5
7
0
Préactionneurs
Sorties
2
4
3
6
8
12
14
10
5
7
11
13
9
15
1
(2)
0
2
4
6
1
3
5
7
24 V
Préactionneurs Sorties
A
2
43
6
8
12
14
10
5
7
11
13
9
20
19
16
15
17 18
1
(1)
0
2
4
6
8
10
1
3
5
7
9
11
12
14
13
15
24 V
B
2
43
6
8
12
14
10
5
7
11
13
9
20
19
16
15
17 18
1
(2)
24 V
2
4
6
1
3
5
7
0
8
9
10
11
Capteurs Entrées
Préactionneurs
Sorties
2
4
3
6
8
12
14
16
10
5
7
11
13
9
15
1
(1)
0
2
4
6
1
3
5
7
8
9
10
11
12
13
14
15
18
20
19
22
24
28
30
26
21
23
27
32
33
34
35
29
25
31
17
(2)
0
3
5
7
2
4
6
8
1
9
11
10
24 V
24 V
Préactionneurs
Sorties
Capteurs Entrées
2
4
3
6
8
12
14
16
18
10
5
7
11
13
9
15
17
10
2
4
6
1
3
5
7
8
10
12
14
9
11
13
15
20
22
21
24
26
30
32
34
28
23
25
29
31
27
33
35
19
(3)
(3)
(3)
(3)
19É240 V
24 V
0
1
3
2
4
5
7
6
8
10
9
11
(1) 24 V
Capteurs Entrées
Préactionneurs
Sorties
$
 6
7
8
9
10
11
12
13
14
15
16
6
7
8
9
10
11
12
13
14
15
16
1
/
16
100%