Le phénomène d`induction électromagnétique

Remarque :
Le nom officiel du champ
B
est l’« induction magnétique », qui peut porter confusion avec le
nom du phénomène qu’on va étudier.
(On utilise plus couramment le champ magnétique)
I Mise en évidence expérimentale
A) Circuit déplacé dans un champ
B
invariant
S N
g
(g : galvanomètre, détecte un courant)
Lorsqu’on déplace la spire, g varie :
- Plus l’aimant est déplacé rapidement, plus g varie fort.
- Dès qu’on arrête l’aimant, g s’arrête.
- Lorsqu’on change le sens du déplacement, la variation se fait dans l’autre sens.
- Lorsqu’on inverse les pôles, tout est inversé.
Roue de Barlow :
B
g
Hg
Quand la roue tourne, g varie, et on a les mêmes phénomènes (selon la vitesse ou
le sens de rotation)
B) Circuit fixe dans un champ
B
variable
S N
g
On déplace cette fois l’aimant.
On observe les mêmes phénomènes.
g
On fait varier I dans la bobine ; on observe le même type de phénomène.
C) Cas mixte
…
D) Conclusion
On a un courant induit, même sans générateur. Ce courant dépend :
- Du sens de la variation/déplacement.
- De l’amplitude de la variation/du déplacement.
- De sa rapidité.
II Origine du courant induit
A) Cas de Lorentz : circuit déplacé/déformé dans un champ
B
stationnaire
e-
B
v
L
F
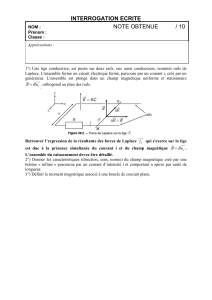
L’électron est alors soumis à une force de Lorentz
)( BvqFL
.
La composante transverse provoque un champ de Hall. La composante
longitudinale provoque un déplacement de l’électron dans le fil et donc un courant.
Le phénomène d’induction électromagnétique

B) Cas de Neumann : circuit fixe dans un champ
B
variable
Le champ
),( trB
induit un champ
E
, qui mettra alors en mouvement l’électron.
Ainsi, on observe des phénomènes similaires selon que
B
varie ou le circuit, mais les
phénomènes ne sont pas dus à la même cause.
III Etude quantitative de l’induction
A) Loi d’Ohm dans un champ magnétique
1) Introduction
On considère une distribution de charges, dans laquelle il y a n porteurs de
charge q par unité de volume.
On suppose ces charges initialement fixes dans R.
Elles seront soumises aux forces
Eq
,
v
m
, et en négligeant le terme
d’inertie devant ces deux termes, on aura
E
m
q
v
.
On aura donc un courant
E
m
nq
vnqj
2
On considère un volume
d
de ces porteurs :
v
d
On note R* le référentiel propre de l’élément (en translation rectiligne
uniforme à la vitesse
V
par rapport à R)
2) Loi d’Ohm dans R*
Expression :
**)**(* v
m
BvEqam
En négligeant encore
*am
devant les autres termes :
*)**(* BvE
m
q
v
Donc
*)**(* 2BvE
m
nq
j
Analyse :
-
*j
est colinéaire à
*v
, donc il y a dans
*E
une composante colinéaire
à
j
, et une orthogonale à
j
qui annule
** Bv
.
Donc
*
.*
Ej
, et
**0 *
// BvE
- Ordre de grandeur : en général,
**
//
EE
:
Pour un fil de section
2
mm1s
, parcouru par un courant
A1I
,
On aura un courant
26 A.m10
j
, et
16S.m10~
, donc
1*
// V.m1~
E
.
Et les porteurs on une vitesse moyenne
15 m.s10~*
v
; pour un champ
T1~*B
, on aura
15* V.m10~
E
.
- Ainsi,
*..* *
// EEj
.
3) Loi d’Ohm dans R.

Expression :
*)( v
m
BvEqam
(Les chocs sont dus au mouvement des électrons par rapport au réseau)
Donc en négligeant le terme inertiel :
)(* BvEj
Mais
Vjj
.*
, et pour un conducteur
0
(les porteurs en trop
atteignent, même en régime variable, la surface en un temps de l’ordre de
s10 18
)
Donc
)( BvEj
Ordre de grandeur :
On a
*vVv
Et
15 m.s10~*
v
,
1
m.s1~
V
Donc
)( BVEj
.
B) Cas des circuits filiformes : théorème de Faraday
1) Cas de Lorentz (circuit déplacé dans un champ magnétique stationnaire)
Loi d’Ohm globale :
+B
Ald
d
On suppose
B
stationnaire.
On a
BvE
j
Donc
ldBvldE
ldj
)(
Soit (
ldj
//
) :
B
A
B
A
B
AldBvldE
jdl
)(
Mais
dt
d
dt
ld
Vvv
*
Donc
B
A
B
A
B
AldB
dt
d
ldV
s
Idl
)(
Soit
ABBAABAB eVVRi
, avec
B
A
AB ldBVe
)(
Ou
ABABABAB euRi
(on est en ARQP magnétique)
Champ électromoteur de Lorentz :
On pose
BVEm
, avec
dt
d
V
.
m
E
est homogène à un champ électrique, mais n’est pas un champ électrique
On dit qu’il est électromoteur car c’est comme si une force
m
Eq
s’appliquait
sur le circuit pour mettre les porteurs en mouvement.
Force électromotrice d’induction :
B
AmAB ldEe
Pour tout le circuit,
ldEe m
.
Théorème de Faraday :

- Portion de circuit AB :
On a
dt
d
V
, soit
Bld
dt
d
ldBV
)(
Donc
c
B
Ac
B
A
B
A
AB
d
dt
BS
dt
Bldd
dt
Bld
dt
d
e
11
1
2
Soit
dt
d
ec
AB
.
- Pour le circuit tout entier,
dt
d
ec
Comme
B
est stationnaire,
dd c
et donc
dt
d
e
.
Exemples :
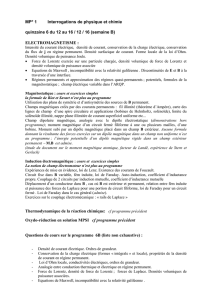
- Déplacement d’une tige conductrice :
V
B
+
-
A
B
V
B
(1) On a
BVEm
(2) Il y a de plus un champ électrique à cause des charges qui s’accumulent,
jusqu’à compenser
m
E
.
(3) En régime permanent,
0
AB
i
et
0
AB
u
.
On a
ABABABAB euiR
, donc on devrait avoir
0
AB
e
:
Théorème de Faraday :
Calcul de
c
d
:
A
B
d
c
Sd
l
On a donc
0
c
d
, et
0 dt
d
ec
AB
.
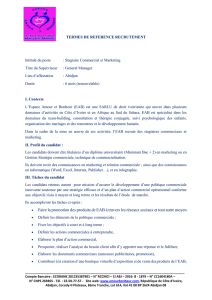
- Déplacement d’un cadre rectangulaire :
D A
B
C
B
V
DA
B
C
m
E
m
E
m
E
m
E
B
(1) On a
BVEm
Dans les branches CB, DA, on a un effet Hall
Dans les branches CD, BA, les charges + s’accumulent en bas, les – en haut.
(2) Si
B
est uniforme, on aura une tension entre A, B, C et D, mais pas de
courant (
0 dt
d
e
)
(3) Si par exemple
B
est décroissant dans le sens de
V
, on aura une
circulation des électrons de C vers B et donc un courant i positif (de B
vers C…) :
0 dt
d
euRi
.
2) Cas de Neumann
On prend cette fois un circuit fixe dans un champ
),( trB
variable.

On aura
t
A
VE
Loi d’Ohm globale
On a
)( BvEj
Donc entre deux points A et B du circuit :
B
A
B
A
B
A
B
AldBvld
t
A
ldVld
j
Soit, en ARQP magnétique :
0 ABABABAB euiR
(on a
dt
ld
v
)
On retrouve donc la même loi.
Champ électromoteur de Neumann :
On a
t
A
Em
.
- C’est une partie du champ électrique.
- Il dépend du choix de jauge, donc on peut obtenir éventuellement des
paradoxes…
Force électromotrice d’induction :
B
A
AB ld
t
A
e
On a
ABABABAB euiR
, donc
ABAB eu
ne dépend pas du choix de jauge,
alors que chacun des termes indépendamment en dépend.
En fait, on ne parle du cas de Neumann que lorsqu’on travaille avec un
circuit entier.
On a ainsi
eRi 0
et
ld
t
A
e
, indépendant du choix de jauge.
Théorème de Faraday : comme le circuit est fixe,
On a
SdA
dt
d
ldA
dt
d
ld
t
A
e
Soit
dt
d
e
.
Exemple :
+
solénoïde
IB
On a
2
0.).(RtnI
(en ARQP magnétique)
On débranche le solénoïde.
Ainsi,
)(tI
passe de I à 0.
Pendant la décroissance de
, on aura
0i
dans la spire.
3) Cas général
C’est lorsque le circuit se déplace dans un champ variable.
On aura alors
BV
t
A
Em
, et on aura toujours
dt
d
e
(admis).
4) Courant et quantité d’électricité induits
Courant induit :
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
1
/
21
100%