Cours

Convertir l’énergie électrique :
Les différents types de moteurs et leur commande
Cours
Page 1/6
Bras robotisé
Fonction :______________________________________
_______________________________________________
Critères de choix des moteurs :_____________________
________________________________________________
Moteurs utilisés :_________________________________
Un servomoteur est un moteur électrique asservi en position. Il possède un capteur de type potentiomètre (dont
la résistance varie en fonction de l’angle) raccordé sur sa sortie qui permet de connaitre la position de l’axe du
moteur.
Avantages
Inconvénients
Raccordement :
Un servomoteur se raccorde avec seulement 3 fils :
- noir : la masse,
- rouge : +5v ,
- blanc ou jaune : la commande par
impulsion de la position du servomoteur.
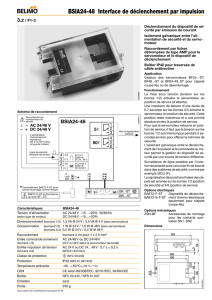
Fonctionnement du servomoteur analogique :
Un servomoteur analogique dispose de trois fils codés par des couleurs. Les fils rouge et noir sont destinés à
son alimentation. Le troisième fil de couleur jaune ou blanche sert à transmettre les ordres au servomoteur sous
forme d’impulsions codées en largeur.
Principe de commande :
Il suffit d'envoyer une impulsion et c'est le temps que durera cette
impulsion qui déterminera l'angle du servomoteur. Ce temps
d'impulsion est de quelques de quelques millisecondes et doit être
répété à intervalles réguliers (toutes les 20 ms à 50ms). Si le temps
d'impulsion varie d'un fabricant à l'autre, les valeurs suivantes sont
assez standard:
1 ms = -45 degré
1.50 ms = 0 degré
2 ms = +45 degrés

S si
Les différents types de moteurs et leur commande
Cours
Page 2/6
Pilotage :
Le pilotage d’un servomoteur analogique, ne demande pas d’interface de puissance, il peut être directement
branché à une sortie MLI (Modulation à Largeur d’Impulsion) ou PWM (Pulse Width Modulation) d’un
microcontrôleur.
Robot Nao
Fonction :_____________________________________________________
______________________________________________________________
Critères de choix des moteurs :___________________________________
____________________________________________
Moteurs utilisés :___________________________
Fonctionnement du
servomoteur numérique :
Les servomoteurs numériques disposent aussi de trois
fils. Deux fils d’alimentation, plus un fil de pilotage. Ce
dernier fil véhicule des mots numériques envoyés en
série.
Avantages
Inconvénients
Pilotage :
Le pilotage d’un servomoteur numérique, ne demande pas d’interface de puissance, il peut être directement
branché à une sortie de transmission série.
Pousse seringue
Fonction :_________________________________
__________________________________________
Critères de choix du moteur :_________________
__________________________________________
Moteur utilisé :________________________
Un moteur pas à pas est un moteur qui est alimenté en courant continu. Son rotor est
constitué de N pôles magnétiques (Nord et Sud). Son Stator est constitué de bobines qui
sont alimentées par un circuit électronique les unes à la suite des autres pour créer des
pôles nord et sud en fonction du sens d’alimentation. On trouve par exemple ce type de
moteur dans les imprimantes jet d’encre pour déplacer les têtes d’impression ou
entraîner le papier.

S si
Les différents types de moteurs et leur commande
Cours
Page 3/6
L’axe du moteur tourne par pas. En fonction du moteur, le pas peut être compris entre 0.5° et 90°.
Ce type de moteur se trouve dans un grand nombre de périphériques informatiques : imprimantes, lecteur de
disquettes ou disque dur qui demandent une grande précision de positionnement.
Avantages
Inconvénients
Pilotage :
Pour piloter le moteur pas à pas, il
faut rajouter un étage de puissance.
Effectivement, le microcontrôleur n’a
pas la puissance nécessaire pour
alimenter ce moteur.
Robot Rovio
Fonction :____________________________________________
_____________________________________________________
Critères de choix du moteur :____________________________
_____________________________________
Moteur utilisé :_________________________
Fonctionnement dumoteur à courant continu : (voir cours)
Avantages
Inconvénients
Interface de
puissance
PaP
Phase 1
Phase 2
Phase 3
Phase4
Moteur à 6 pas et quatre phases

S si
Les différents types de moteurs et leur commande
Cours
Page 4/6
Changement du sens de rotation du moteur
Surligner de deux couleurs sur le schéma de puissance la circulation du courant
pour les deux sens de rotation du moteur.
Quels sont les rôles des interrupteurs KM1 et KM2.
Variation de la vitesse du moteur
Pour faire varier la vitesse d'un
moteur on l'alimente de façon
discontinue avec un hacheur
On parle alors de Modulation par
Largeur d'Impulsions (MLI), ou
Pulse Wide Modulation (PWM)
Quand le transistor est saturé, le
moteur est alimenté à la tension
maximale. Quand le transistor
est bloqué, le moteur n'est plus
alimenté.
La fréquence est suffisamment élevée pour avoir une rotation continue et sans bruit du moteur.
Choix de l’interface de puissance (distributeur) :
Le pilotage d’un moteur à courant continu à partir d’un système microprogrammé se fait par l’intermédiaire
d’une interface de puissance, il doit pouvoir inverser le sens de rotation des roues et fournir la puissance
nécessaire au fonctionnement.
L’interface de puissance le plus adapté est un pont en H piloté par trois entrées dont voici un exemple de table
de vérité :
Enable
(validation)
IN1 (commande
de KM1)
IN2 (Commande
de KM2)
Etat moteur
0
X
X
Arrêt
1
1
0
Sens 1
1
0
1
Sens 2
- L’entrée ENA est reliée à une sortie binaire du microcontrôleur,
- Les entrées IN1 et IN2 doivent être reliées aux sorties PWM (Pulse Wild Modulation) du
microcontrôleur, afin de permettre la commande dans les deux sens à vitesse variable.
Interface de
puissance
MCC
ENA
IN1
IN2

S si
Les différents types de moteurs et leur commande
Cours
Page 5/6
Drone Parrot
Fonction :_____________________________________________
______________________________________________________
Critères de choix du moteur :_____________________
______________________________________________
Moteur utilisé :________________________
Fonctionnement du moteur brushless :
Le moteur brushless est un moteur synchrone à aimants permanents.
Contrairement au moteur à courant continu, il ne possède pas de balais et s’use donc beaucoup moins vite. Il
permet d’atteindre des vitesses importantes, par contre, il est beaucoup plus cher qu’un moteur à courant
continu.
Pour assurer la commutation des courants au stator, un système électronique doit être utilisé. Pour des petites
puissances, comme le drone, ce système est intégré au moteur. Ainsi, vu de l’extérieur, ce moteur est un
moteur à courant continu sans balais.
Barrière Sympact
Fonction :_____________________________________________
______________________________________________________
Critères de choix du moteur :
______________________________________________________
______________________________________________________
Moteur utilisé : ___________________________________
Le moteur asynchrone est très utilisé dans l'industrie. D'une puissance allant de
moins d'un kilowatt, à plusieurs dizaines de MW, les moteurs asynchrones équipent
la majorité des équipements suivants : machines-outils, monte-charges, tapis-
roulants, compresseurs de réfrigérateurs et congélateurs, machines à laver...
Le moteur asynchrone est utilisé quand on dispose d'une source d'alimentation
alternative (réseau EDF triphasé ou monophasé)
Le moteur asynchrone est réversible. On peut utiliser cette réversibilité soit pour
réinjecter l'énergie dans le réseau, soit pour obtenir un couple de freinage.
Le stator bobiné est composé de trois bobines qui créent 3 champs
magnétiques. Ces bobines étant alimentées par du courant triphasé, elles
créent chacune un champ magnétique variable. La composition de ces trois
champs magnétiques crée un champ magnétique tournant qui entraîne le rotor
en rotation par la création d’une force électromagnétique.
 6
6
1
/
6
100%