Informatique temps réel

Informatique temps réel
Hervé Le Provost
Hervé Le Provost
DSM/IRFU - CEA Saclay
avec la participation de Shebli Anvar
Version 2.2 – 11 Février 2011

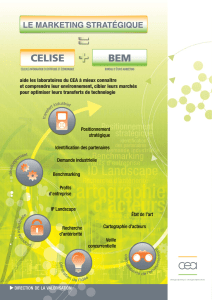
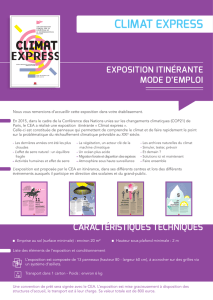
Circuits numériques : la mémoire
MOT 0
MOT 1
MOT 2
ECRITURE
MEMOIRE
ORDRE
ECRITURE
/LECTURE
herve.le-prov[email protected]
2
ADRESSE DONNEE
MOT 2
MOT N
LECTURE
MÉMOIRE 512x8
512 cases de données 8-bit
Largeur du bus d’adresse ?

ADRESSE
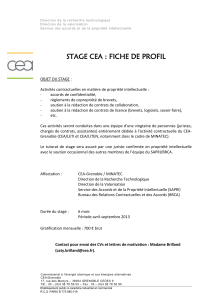
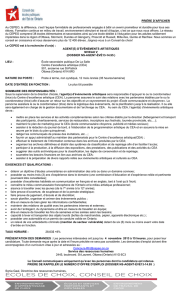
Circuits numériques : la mémoire
MOT 0
MEMOIRE
Bit 0
Bit 1
int main() {
char *adresse;
char donnee=6;
adresse=(char*)0x30;
*adresse=donnee; //ecriture
….
donnee=*adresse;//lecturE
}
ECRITURE à l’adresse 48 de la valeur 6
/ LECTURE
herve.le-prov[email protected]
3
DONNEE
MOT 0
MOT 1
MOT 2
MOT 511
LECTURE
ECRITURE
MÉMOIRE 512x8
Largeur du bus d’adresse
2exp(9)=512
Bit 1
Bit 2
Bit 3
Bit 4
Bit 5
Bit 6
Bit 7
Bit 8
}
8
8

Circuits numériques : la mémoire
Mémoires non Volatiles
ROM (Read Only Memory), programmée à la
fabrication
PROM (Programmable ROM), programmée une
seule fois par l’utilisateur.
EPROM (Erasable PROM), programmable plusieurs
fois par l’utilisateur sur des machines dédiées
EEPROM (
Electrically
Erasable
PROM),
herve.le-prov[email protected]
4
EEPROM (
Electrically
Erasable
PROM),
programmable plusieurs fois par l’utilisateur in-situ
Les plus utilisées : FLASH, BIOS carte mère PC.
Rapides et haute densité (plusieurs Méga
octets)
NVRAM (Non volatile Random Access Memory)
Mémoires Volatiles
RAM (Random Access Memory), SRAM, SDRAM,
DDR2, DDR3.

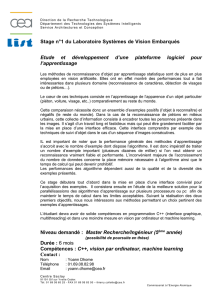
décimal binaire Hexa-
décimal
00000 0
10001 1
20010 2
30011 3
Circuits numériques : codage des valeurs
décimal binaire Hexa-
décimal
81000 8
91001 9
10 1010 A
11 1011 B
herve.le-prov[email protected]
5
40100 4
50101 5
60110 6
70111 7
12 1100 C
13 1101 D
14 1110 E
15 1111 F
Valeur décimale 47, codage binaire et hexadécimal ?
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
1
/
117
100%