sybot. productivité robotique et savoir-faire humain

SYBOT. PRODUCTIVITÉ ROBOTIQUE ET
SAVOIR-FAIRE HUMAIN
?!
PROOF
PRINCIPALES
TECHNOLOGIES
DU CEA LIST :
– Actionnement à vis à billes etcâbles.
– Contrôle d’effort.
– Détection decontacts.
– Contrôleur logiciel derobot.
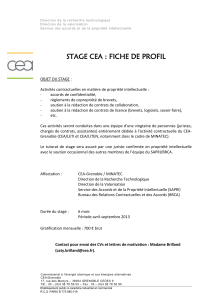
© Francis Rhodes/CEA
ENJEUX
La startup SYBOT propose des robots
collaboratifs conçus pour l’interaction avec les
opérateurs humains.
L’opérateur se concentre sur son savoir-faire. Le robot
réduit la pénibilité et accroît la productivité.
INNOVATION
Issue du CEA LIST et lauréate du concours national
iLab 2015, SYBOT exploite une innovation technolo-
gique de rupture.
Le remplacement des engrenages du robot par un
système de transmission issu de 10 ans de R&D et
breveté par le CEA LIST, apporte un contrôle précis
des efforts exercés.
Cette performance unique permet aux opérateurs
de travailler en toute sécurité au contact du robot
et d’optimiser la production par une robotisation
simple, flexible et robuste.
PERSPECTIVES
Doté d’une plateforme robotique sans équivalent, le Laboratoire de Robotique Interactive du CEA
LIST et les équipes de SYBOT accompagnent les industriels dans l’analyse des postes de l’atelier,
puis de la preuve de concept à la mise en œuvre industrielle d’une solution.
Contact : contact@sybot-industries.com | yann.perrot@cea.fr
www.sybot-industries.fr | www-list.cea.fr

SYB4 : «4 AXES»
– Palettisation en présence d’opérateurs
– Assistance à manipulation
– Génération d’effort pour assemblage
– Port d’outils conjoint avec opérateur
(contrôle …)
SYB6 : « 6 AXES»
– Palettisation en présence d’opérateurs
– Assistance à manipulation
– Génération d’effort pour assemblage
– Port d’outils conjoint avec opérateur
(contrôle …)
ET
– Contrôle d’effort pour process au contact
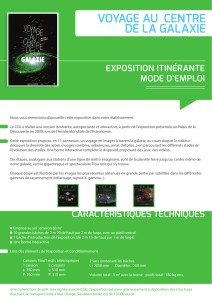
CARACTÉRISTIQUES GÉNÉRALES
– Rayon d’action : 1,2 m, de l’épaule au poignet
– Charge utile : > 8kg (suivant configurations)
– Vitesse maximale : > 1m/s
– Vérin à câble, sans jeu, faible inertie et frottement, très haut rendement
– Raideur d’asservissement objectif : 6000 N/m
– Poids propre : 40kg
Pour des caractéristiques personnalisées, nous consulter.
VERSION STANDARD
– Sur socle
– Alimentation 230V, 50Hz, 16A
– Répétabilité < 0,5mm (en évaluation)
OPTIONS
– Précision absolue : capteurs articulaires
haute qualité
– Étanchéité améliorée : objectif IP67
– Mobilité : version EOM, tension réduite à
96V continu, baie de commande réduite
CONTRÔLEUR LOGICIEL
– API de commande via Ethernet
– Langage de programmation au choix : compilé (C, C++) ou interprété (python, java, VB(A), Matlab/
Simulink...)
– Modes de commande standards :
– Trajectoires articulaires et cartésiennes
– Gestion standard de repères
– Contrôle hybride force / position
– Téléopération avec ou sans retour d’effort
© Francis Rhodes/CEA
Contact : contact@sybot-industries.com | yann.perrot@cea.fr
www.sybot-industries.fr | www-list.cea.fr
1
/
2
100%