Support du cours - Groupe Calcul

Calcul Haute Performance
architectures et modèles de
programmation
programmation
Françoise Roch 1
1
Observatoire
des Sciences de l
’
Univers de
Grenoble
Observatoire
des
Sciences
de
lUnivers
de
Grenoble
Mesocentre CIMENT

Un peu de connaissance des architectures est nécessaire
Des architectures
de plus en plus complexes
avec différents niveaux de parallélisme
Première étape de la paralllélisation :
décoder la relation entre l’architecture et l’application
Adapter les algorithmes, la programmation aux architectures actuelles,
Comprendre le comportement d’un programme,
Choisir son architecture et son modèle de programmation en fonction de ses besoins
Cell
Westmere-EX
2

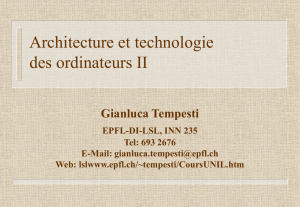
Les ingrédients d’un supercalculateur
Processeur
fournit la puissance de calcul
CPU lti
étll tGPU l
CPU
mu
lti
-core,
é
ven
t
ue
ll
emen
t
GPU
, ou proc p
l
us
spécialisés
Mémoire/Stockage
(
Aujourd’hui très hierarchisé
(
caches, DRAM, SSD, HD,
bandes)
Réseaux
Relient les noeuds entre eux
Souvent plusieurs types (MPI, Administration, I/O)
Logiciels
Logiciels
middleware pour l’accès au ressources distribuées
MPI, gestion des processus, …
L’équilibre entre les différents composants est primordial
3

Sommaire
1. Architecture des ordinateurs
L
•
L
es processeurs
•La mémoire
•Les réseaux
•Les tendances d’évolution
2. Concepts du parallélisme
•Introduction
•Terminologie et classification
•Les différents modèles de programmation
3. Conclusion
4

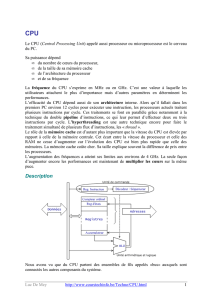
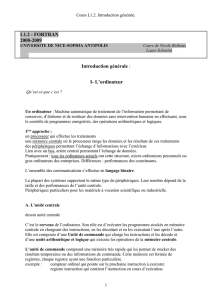
Modèle de Von Neumann (1945)
La mémoire
:contientle
La
mémoire
:
contient
le
programme (instructions) et
les données.
ié ih éi
Une Un
i
t
é
Ar
i
t
h
m
é
t
i
que et
Logique : UAL qui effectue
les opérations.
Une unité de contrôle :
chargée du séquençage des
opérations
opérations
.
Une unité d’Entrée/Sortie.
5
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
1
/
94
100%