Résolution numérique des problèmes aux moindres

Informatique & Math´
ematiques Appliqu´
ees
Optimisation
J. Gergaud & S. Gratton & D. Ruiz
30 avril 2013

Table des mati`
eres
1 Exemples et d´
efinitions 3
I Exemples ..................................................... 3
I.1 Cascontinuetdedimensionfinie .................................... 3
I.2 Probl`
emesennombresentiers ...................................... 10
I.3 Probl`
emeendimensioninfinie...................................... 11
II Probl`
emed’optimisation ............................................. 13
II.1 D´
efinitions ................................................ 13
II.2 Classification............................................... 16
III Exercices ..................................................... 18
2 Outils math´
ematiques 23
I Introduction.................................................... 23
II Alg`
ebre lin´
eaire.................................................. 23
II.1 rappels .................................................. 23
III Calcul diff´
erentiel................................................. 24
III.1 Notations................................................. 24
III.2 Th´
eor`
eme des fonctions compos´
ees ................................... 25
III.3 FormuledeTaylors............................................ 26
III.4 Courbesdeniveau ............................................ 26
III.5 Surfaces et plan tangent dans R3..................................... 27
IV Convexit´
edesapplications ............................................ 27
IV.1 Ensembles convexes - applications convexes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
IV.2 Convexit´
e et d´
eriv´
ee premi`
ere ...................................... 28
IV.3 Convexit´
e et d´
eriv´
eeseconde....................................... 29
IV.4 Illustrations................................................ 30
V Exercices ..................................................... 30
V.1 Aveccorrections ............................................. 30
3 Existence de solution, unicit´
e de solution 33
I Introduction.................................................... 33
II Existencedesolution ............................................... 33
II.1 Probl`
emesaveccontraintes........................................ 33
II.2 Probl`
emesanscontraintes ........................................ 34
III Casconvexe.................................................... 34
IV Exercices ..................................................... 36
IV.1 Corrig´
esdesexercices .......................................... 36
IV.2 Exercicessanscorrections ........................................ 36
4 Condition n´
ecessaire, condition suffisante de solution
Cas sans contraintes et cas de contrainte convexe 39
I Conditiondupremierordre............................................ 39
I.1 Cassanscontraintes ........................................... 39
I.2 Casdecontraintesconvexes ....................................... 39
I.3 Probl`
emesconvexes ........................................... 40
II Conditions du deuxi`
emeordre .......................................... 40
II.1 Condition n´
ecessaire ........................................... 40
II.2 Conditionsuffisante ........................................... 41
III Exercices ..................................................... 42
i

ii TABLE DES MATI `
ERES
5 Probl`
emes aux moindres carr´
es 45
I Introduction.................................................... 45
II Les moindres carr´
es lin´
eaires........................................... 45
II.1 Rappels.................................................. 45
II.2 Approximation d’une fonction au sens des moindres carr´
es....................... 46
III La m´
ethodedeNewton .............................................. 47
III.1 Introduction................................................ 47
III.2 Algorithme de Newton pour r´
esoudre f(x) = 0 ............................. 47
III.3 R´
esolution d’´
equations : cas de la dimension n . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
III.4 Convergence ............................................... 49
III.5 Application aux probl`
emesd’optimisation................................ 50
IV R´
esolution des probl`
emes aux moindres carr´
es non lin´
eaires .......................... 51
IV.1 AlgorithmedeNewton.......................................... 51
IV.2 AlgorithmedeGauß-Newton....................................... 51
IV.3 Exemples................................................. 51
6 Probl`
emes avec contraintes 55
I Introduction.................................................... 55
II Conditionsdupremierordre ........................................... 56
II.1 Conditions du premier ordre : contraintes sous forme ´
egalit´
es...................... 56
II.2 Qualificationdescontraintes....................................... 59
II.3 Th´
eor`
emedeKaruch,KuhnetTucker.................................. 61
II.4 Casconvexe................................................ 62
III Conditionsdusecondordre............................................ 63
III.1 Conditions N´
ecessairesdusecondordre................................. 63
III.2 Conditionssuffisantes .......................................... 64
IV Exercices ..................................................... 65
IV.1 Aveccorrections ............................................. 65
7 Introduction `
a la dualit´
e 67
I Pointselle..................................................... 67
I.1 D´
efinition................................................. 67
I.2 Caract´
erisation .............................................. 68
II Conditionsuffisantedesolution ......................................... 68
II.1 Pointselledelagrangien ......................................... 68
II.2 Condition suffisante de solution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
III Dualit´
e....................................................... 69
III.1 D´
efinition du probl`
eme dual et th´
eor`
emes................................ 69
III.2 Cas d’un probl`
eme lin´
eaire........................................ 70
IV Exercice...................................................... 70

Chapitre 5
Probl`
emes aux moindres carr´
es
I Introduction
L’objectif de ce chapitre est de r´
esoudre les probl`
emes aux moindres carr´
es non-lin´
eaires.
(P1)Min f(β) = 1
2||r(β)||2
β∈Rp.
Dans le cas o`
u l’application rest affine, le probl`
eme est lin´
eaire et sera r´
esolu facilement. Si rn’est pas affine, il nous faut
d´
evelopper des algorithmes pour calculer une solution. La branche des math´
ematiques qui s’occupe de ces questions pour les
probl`
emes d’optimisation continues s’appelle l’optimisation continue et sera abord´
ee en deuxi`
eme ann´
ee. Nous allons ici nous
limiter `
a des algorithmes de base pour les probl`
emes aux moindres carr´
es, qui sont l’algorithme de Newton et l’algorithme de
Gauß-Newton.
II Les moindres carr´
es lin´
eaires
II.1 Rappels
Consid´
erons le probl`
eme aux moindres carr´
es lin´
eaire
(P2) Min f(β) = 1
2||y−Xβ||2
β∈Rp.
Ce probl`
eme admet une solution. En effet, ce probl`
eme est ´
equivalent `
a r´
esoudre
(P3) Min g(γ) = 1
2||y−γ||2
γ∈ImX⊂Rn.
Comme ImXest un ferm´
e et que gest 0−coercive, le th´
eor`
eme 3.II.2.2 d´
emontre l’existence d’une solution.
Remarque II.1.1
Le probl`
eme (P3) est en fait le probl`
eme de la projection orthogonale du vecteur ysur ImX. Il poss`
ede une unique solution
car gest strictement convexe. Par contre le probl`
eme initial (P2) poss`
ede une ou une infinit´
e de solutions suivant que le rang
de Xest pou est strictement inf´
erieur `
ap.
Le probl`
eme (P2) est un probl`
eme convexe et diff´
erentiable, par suite une solution est caract´
eris´
ee par les ´
equations,
appel´
ees dans ce cas les ´
equations normales,
∇f(β) = XTXβ −XTy= 0.(5.1)
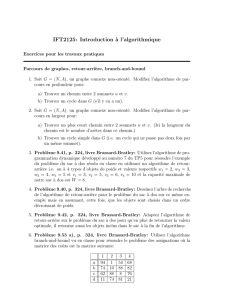
Illustration graphique II.1.2 Consid´
erons ici la matrice Xcomme l’expression d’une application lin´
eaire de Rp`
a valeurs
dans Rn. on a alors
Rp=Ker X⊥⊕Ker XRn= ImX⊕ImX⊥=ImX ⊕Ker (XT)
β∗=X+y γ∗=P rojImX (y)
X+X=P roj(Ker X)⊥XX+=P rojImX
Si rang (X) = p, alors Ker X={~
0}et β∗= (XTX)−1XTy
45

46 CHAPITRE 5. PROBL `
EMES AUX MOINDRES CARR ´
ES
II.2 Approximation d’une fonction au sens des moindres carr´
es
Le probl`
eme de l’approximation d’une fonction fsur un intervalle I⊂Rest fondamentalement diff´
erent de celui de
l’interpolation. Il consiste `
a remplacer la fonction fconsid´
er´
ee par une autre fonction P(x)(en g´
en´
eral plus r´
eguli`
ere, et
facile `
a manipuler) de sorte que la distance entre fet Psoit aussi petite que possible.
On peut chercher par exemple un polynˆ
ome de bas degr´
e, qui approche la fonction fen un sens `
a pr´
eciser sur l’intervalle
I, ce qui diff`
ere du probl`
eme d’interpolation qui consiste a trouver un polynˆ
ome de degr´
e en g´
en´
eral ´
elev´
e qui co¨
ıncide au
maximum avec la fonction f.
La notion de distance entre les fonctions fet Pest bien ´
evidemment fondamentale dans la d´
efinition du proc´
ed´
e d’ap-
proximation. On pourra par exemple distinguer :
(i) l’approximation au sens de la convergence uniforme, o`
u il s’agit de minimiser
max
x∈I|f(x)− P(x)|=kf− Pk∞,
(probl`
eme ne relevant pas des moindres carr´
es)
(ii) l’approximation en moyenne quadratique o`
u il s’agit de minimiser la quantit´
e
ZI
(f(x)− P(x))2dx =kf− Pk2
L2(I),
(iii) l’approximation au sens des moindres carr´
es discrets, utile lorsque fn’est connue que de mani`
ere discr`
ete (c’est `
a
dire sur un ensemble fini de points xi∈I,1≤i≤m) ; cette approximation consiste alors `
a minimiser la quantit´
e
m
X
i=1
(f(xi)− P(xi))2.
Approximation en moyenne quadratique
On se propose d’approcher fsur l’intervalle I= [a, b]par une fonction P(x), o`
uPest une combinaison lin´
eaire d’un
ensemble de nfonctions donn´
ees uj∈L2(I),j= 1, . . . , n,
P(x) =
n
X
j=1
βjuj(x),
les coefficients βj´
etant donc les inconnues `
a d´
eterminer de fac¸on `
a minimiser la quantit´
e
f(β1, . . . , βn) = kf− Pk2
L2(I)=Zb
a
(f(x)−
n
X
j=1
βjuj(x))2dx .
Remarque : Si on souhaite r´
ealiser une approximation polynˆ
omiale de f, il suffira de choisir
uj(x) = xj−1, j = 1,2, . . . , n .
Proposition II.2.1 Soit β∈Rnle vecteur des coefficients βj,j= 1, . . . , n. Une condition n´
ecessaire et suffisante pour que
βr´
ealise le minimum de la fonctionnelle f(β), est que βsoit solution du syst`
eme lin´
eaire suivant
n
X
j=1
(uj|ui)βj= (f|ui), i = 1, . . . , n ,
avec
(uj|ui) = Zb
a
uj(x)ui(x)dx
(f|ui) = Zb
a
f(x)ui(x)dx
 6
7
8
9
10
11
12
13
14
15
6
7
8
9
10
11
12
13
14
15
1
/
15
100%