Décision Complexe

1
Prisededécisionscomplexes
1
Plan
•Problèmesdedécisionsséquentielles
•Algorithme«valueiteration »
•Algorithme« policyiteration »
•POMDP
•Réseaudedécisiondynamique
2
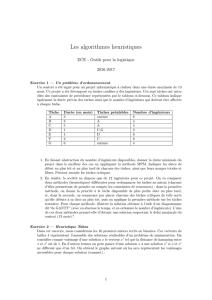
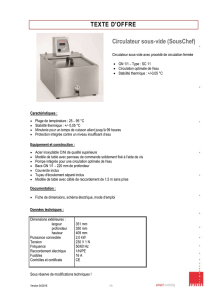
Exemple
•Touslesétatsnonterminauxontune
récompensede‐0.04
3

2
Exemple
•Sil’environnementétait
déterministe,lasolutionserait:
[Haut,Haut,Droite,Droite,
Droite]
•Dûàl’incertitude,cechemin
n’aque0.85+(0.14*0.8)=
0.32776chancederéussite.
4
Modèledetransition
•Lemodèledetransitionspécifielaprobabilité
dechaquerésultatpossibled’uneaction.
•T(s,a,s’):laprobabilitéd’atteindrel’états’en
effectuant l
’
action
a
dans l
’
état
s
effectuant
laction
a
dans
létat
s
.
•OnsupposedestransitionsMarkoviennes
–Laprobabilitéd’atteindres’nedépendquedeset
nondesétatsprécédents.
5
Fonctiond’utilité
•Commeleproblèmededécisionest
séquentiel,lafonctiond’utilitédoitdépendre
d’uneséquenced’états.
•
L
’
agent reçoit une récompense
R
(
s
)qui peut
•
Lagent
reçoit
une
récompense
R
(
s
)
qui
peut
êtrepositiveounégative.
•L’utilitéd’unesuited’étatest(pourle
moment)lasommedesrécompensesreçues.
6

3
ProcessusdedécisiondeMarkov
•Problèmededécisionséquentielledansun
environnementcomplètementobservable
avecunmodèledetransitionMarkovienet
desrécompensesadditives.
•UnMDPestdéfinipar:
–Étatinitial:S0
–Modèledetransition:T(s,a,s’)
–Fonctionderécompense:R(s)
7
Politique
•Unesolutionauproblèmenepeutpasêtreune
suited’actionfixe.
•Ilfautpouvoirspécifierl’actionàfairedans
chaqueétat.
•Ceciestappeléunepolitique(π)
•π(s)estl’actionrecommandéeparlapolitiqueπ
pourl’états.
•Lapolitiqueoptimaleπ*estcellequial’utilité
espéréemaximale.
8
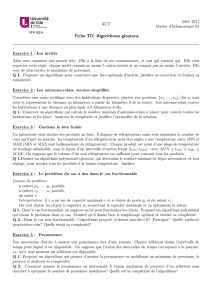
Politiqueoptimale
(Risk vsReward)
9
HGD : pénible, désagréable,
BGD : morne, agréable

4
Fonctiond’utilité
•OnveutdéfinirUh([s0,s1,…,sn])
•PourunhorizonfinioùaprèsNétapes,the
``gameisover’’:
–Uh([s0,s1,…,sN+k])=Uh([s0,s1,…,sN])
–Lapolitiqueoptimaleestnonstationnaire
•Lapolitiqueoptimalepeutchangerdansletemps.
•Pourunhorizoninfini,lapolitiqueoptimale
eststationnaire.
10
Assignationd’utilité
•Récompensesadditives:
•Récompensesescomptées(discounted):
–oùlefacteurd’escompteestunnombreentre0et1.
–L’agentpréfèrelesrécompensesimmédiates.
11
«ValueIteration »
•Algorithmeutilisépourcalculerunepolitique
optimale.
•Idée:Calculerl’utilitédechaqueétatet
utiliser ces utilités pour choisir l
’
action
utiliser
ces
utilités
pour
choisir
laction
optimaledanschaqueétat.
12

5
Utilitéd’unétat
•L’utilitédoitêtredéfiniesuruneséquence
d’états.
•Ondonnecommeutilitéàunétatl’utilité
espérée des séquences d
’
états qui peuvent le
espérée
des
séquences
détats
qui
peuvent
le
suivre.
•Lesséquencesd’étatsdépendentdela
politiqueexécutée.
13
Utilitéd’unétat
•Lavéritableutilitéd’unétatU(s)estUπ*(s).
•C’est‐à‐direlasommeespéréedes
récompensesescomptéessil’agentexécutela
politique optimale
politique
optimale
.
•R(s):Larécompenseàcourttermed’êtredans
l’états.
•U(s):Larécompenseàlongtermeàpartirde
l’états.
14
Utilitémaximaleespérée
•Intuitivementetselonleprincipedela
rationalité,l’agentdevraitchoisirl’actionqui
maximisel’utilitéespérée,c’est‐à‐dire:
15
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%