Appareils de mesure à cadre mobile : Cours magnétoélectrique

Mme. S. Ouarhlent
Année universitaire 2013/2014
Page 1
MESURE 1
CHAPITRE II : APPAREILS DE MESURE A CADRE MOBILE
ELEMENT MOTEUR MAGNETOELECTRIQUE
Université de Kasdi Merbah Ouargla
Département d’Electronique
Licence professionnelle / Instrumentation Pétrolière (S3)
I Définition d’un appareil de mesure
Un appareil de mesure est un système qui traduit un phénomène physique non ou difficilement
accessible à nos sens en un autre phénomène pouvant être visualisé et estimé.
Il existe deux grandes sortes d’appareils de mesure :
Les appareils analogiques
Les appareils numériques
De plus en plus les appareils analogiques (à aiguille) sont remplacés par les appareils numériques (à
cristaux liquides ou à affichage digital).
Les premiers appareils de mesure employés étaient des appareils analogiques. Ils étaient construits à
partir d’un cadre mobile. Ce cadre peut aussi servir à la fabrication d’un ampèremètre à courants continu
et alternatif, d’un voltmètre à courants continu et alternatif, d’un ohmmètre et d’un pont de Wheatstone. Il
est sans conteste le plus courant des équipages analogiques.
II Qualités des appareils de mesure
Fidélité
Un appareil est fidèle lorsqu'il donne toujours le même résultat pour une même mesure. C'est une qualité
primordiale. Un appareil qui n'est pas fidèle n'a aucun intérêt.
Sensibilité - Résolution
La sensibilité d'un appareil est la plus petite variation de mesure qu'il peut déceler. Avec certains
appareils on utilise le terme de résolution, la résolution d'un appareil est la plus petite variation de la
grandeur mesurée qui produit une variation perceptible de l'indication délivrée par l'instrument. Elle peut
être exprimée en points, qui sont alors le nombre de valeurs différentes que l'instrument peut afficher. Par
exemple un multimètre de 2000 points pour une étendue de 2 V peut afficher toutes les valeurs comprises
entre 0,000 V et 1,999 V, sa résolution est donc de 1 mV.
Justesse
Un appareil est juste si la différence entre la mesure qu'il indique et la valeur exacte (inconnue) ne
dépasse pas l'incertitude prévue.
Ce n'est pas une qualité primordiale, parce que l'appareil faux provoque une erreur systématique qu' il est
possible de corriger lorsqu'elle est connue.

Mme. S. Ouarhlent
Année universitaire 2013/2014
Page 2
MESURE 1
CHAPITRE II : APPAREILS DE MESURE A CADRE MOBILE
ELEMENT MOTEUR MAGNETOELECTRIQUE
Université de Kasdi Merbah Ouargla
Département d’Electronique
Licence professionnelle / Instrumentation Pétrolière (S3)
Consommation
Problème de coût , Un appareil qui consomme peu perturbe moins la grandeur a mesurer.
Prix
III Classification des appareils
La classification usuelle utilise la nature du phénomène physique déterminant le couple moteur :
Appareils magnéto électriques
Appareils ferromagnétiques
Appareils ferrodynamiques
Appareils à induction
Appareils thermiques
Appareils électrostatiques
Appareils électroniques

Mme. S. Ouarhlent
Année universitaire 2013/2014
Page 3
MESURE 1
CHAPITRE II : APPAREILS DE MESURE A CADRE MOBILE
ELEMENT MOTEUR MAGNETOELECTRIQUE
Université de Kasdi Merbah Ouargla
Département d’Electronique
Licence professionnelle / Instrumentation Pétrolière (S3)
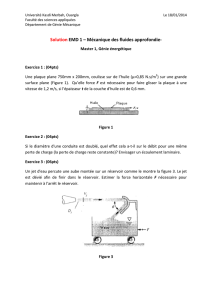
IV Les differents symboles
a. Symboles relatifs au principe de fonctionnement

Mme. S. Ouarhlent
Année universitaire 2013/2014
Page 4
MESURE 1
CHAPITRE II : APPAREILS DE MESURE A CADRE MOBILE
ELEMENT MOTEUR MAGNETOELECTRIQUE
Université de Kasdi Merbah Ouargla
Département d’Electronique
Licence professionnelle / Instrumentation Pétrolière (S3)
b. Symboles de courants
c. Position à donner à l'appareil lors d'une mesure

Mme. S. Ouarhlent
Année universitaire 2013/2014
Page 5
MESURE 1
CHAPITRE II : APPAREILS DE MESURE A CADRE MOBILE
ELEMENT MOTEUR MAGNETOELECTRIQUE
Université de Kasdi Merbah Ouargla
Département d’Electronique
Licence professionnelle / Instrumentation Pétrolière (S3)
d. Tension d'essai d'isolement subi par l'appareil (en kV).
V Elément moteur magnétoélectrique
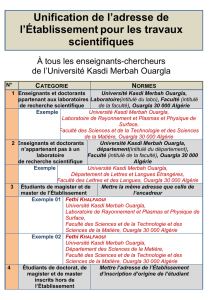
a. Description
Une bobine B en forme de cadre est soutenue par deux pivots
P. Elle peut tourner autour de son axe mais deux ressorts S en
forme de spirale la ramènent à une position de repos. Cette
position de repos est celle de l'aiguille G indiquant le zéro sur le
cadran C. La bobine est placée dans l'entrefer d'un aimant A.
Lorsqu'une différence de potentiel est appliquée aux bornes + et -
le courant qui traverse la bobine provoque la rotation de cette
dernière d'un angle proportionnel à l'intensité du courant.
L'inversion du sens de passage du courant provoque une déviation
de l'aiguille en sens inverse. Le déplacement de l'aiguille est
limitée dans les deux sens par deux butées. Un courant trop élevé
dans le cadre peut le détruire ; l'ordre de grandeur du courant provoquant une déviation complète de
l'aiguille est de 25 à 1000 µA
 6
7
8
9
10
11
12
6
7
8
9
10
11
12
1
/
12
100%