Sommaire - Sitelec

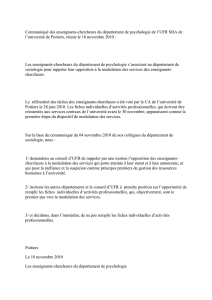
Modulation de largeur d'impulsion Patrick ABATI Janvier 2003
Page 1 / 11
Sommaire
Caractéristiques du moto réducteur Flender
Bilan des puissances
Schéma équivalent simplifié du moteur
Détermination des éléments du schéma équivalent
Structure du variateur de vitesse MV 500
Schéma sous Cedrat - Circuit
Valeurs et paramètres de simulation
Tensions simples et courants par phase
Tensions composées
Courants dans les interrupteurs et la source
Tensions aux bornes des interrupteurs
Influence de l'indice de modulation
Schéma sous PSIM

Modulation de largeur d'impulsion Patrick ABATI Janvier 2003
Page 2 / 11
Caractéristiques du moto - réducteur FLENDER
à engrenages cylindriques D88-A90LC8F
Bilan des puissances
On néglige les pertes joules statoriques, les pertes fer rotoriques et les pertes
mécaniques.
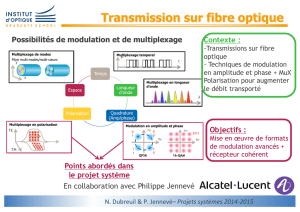
Schéma équivalent simplifié du moteur
du
forme B3
couple nominal du réducteur : 1680 N.m
rapport : 300,41
couple de sortie : 2150 N.m
vitesse de sortie : 2,3 tr/mn
puissance moteur : 0,55 kW à 690 tr/mn
tension d'alimentation : 220-242 V / 380-420 V
courant nominal : 3,8 A / 2,2 A
cosφ = 0,6
ID / IN = 2,8 ; CD / CN = 1,8 ; CM / CN = 1,9
rendement moteur = 64% ; réducteur = 95%
fréquence réseau : 50 Hz
fixation : carter à pied
arbre de sortie : arbre plein (V50 x 100 )
protection : IP55
poids : 94 kg
ventilation externe
contrôle : PTC F
Rµ : résistance représentant les pertes fer au stator
Xµ : réactance magnétisante du stator
XR : réactance totale de fuites
RR : résistance du rotor ramenée au stator
g : glissement

Modulation de largeur d'impulsion Patrick ABATI Janvier 2003
Page 3 / 11
Détermination des éléments du schéma équivalent
Ω 70,2
78,5 14,42 2303
Ω C2 V3
X
N.m 14,4 7,61,9 C1,9
Ω X2 V3
C : maximal couple
W262 597- 859 P - P P : fer pertes W597 78,5 7,6 Ω C P : rotor au transmise puissance
N.m 7,6
72,3
550
Ω
P
C :nominal couple
W859
0,64
550
η
P
P : absorbée puissance
rd/s 72,3
60690π2
60 Nπ2
Ω : rotor du pulsation
rd/s 78,5
60750π2
60 Nπ2
Ω : mesynchronis de pulsation
8% soit 0,08
750
690 - 750
NN - N
g : nominal glissement
tr/mn 750
45060
pf60
N : mesynchronis de vitesse
2
SM
2
R
N
SR
2
M
TAF
SNT
N
U
N
U
A
N
N
S
S
S
NS
N
S
Ω 41
1,463 262
I3P
R et Ω 152,5
1,463 975
I3
Q
= X
A1,46
2303975262
V3 QP
I :tmagnétisan courant
VAR975 = 170 - 1145 = Q - Q = Q : X par consommée réactive puissance VAR1145 1,333 859 tgφ P Q : totale réactive puissance VAR170 0,9 70,2 3 I X 3 Q : X par consommée réactive puissance
Ω 19,7 0,08246 R et Ω 246
g
R
R :donc
e)(impossibl A 2,2 A 3,15
20 70,2
230
I ou A 0,9
246 70,2230
I
R X
V
I
Ω 246 et Ω 20 : racines 2 admet équation cette 0 2942040 R 158700 - R597 0 R 230 3 - R 597 70,2 597
V R 3 )R (X P )
RX
V
(R 3 I
g
R
3
g
P
P
g
R
R : pose on
22
µ
F
µ
22
µ
µ
μ
22
2
µ
2
F
µ
RAμμ
AA
2
2
RRRR
R
N
R
22
R
22
R
2
2
R
R
2
222
22
2
RT
2
2
2
R
2
R
N
R
N
J
T
N
R

Modulation de largeur d'impulsion Patrick ABATI Janvier 2003
Page 4 / 11
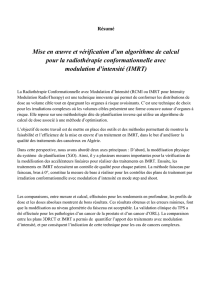
Structure du variateur de vitesse MV500 (Alstom)
L'ensemble Dr1 à Dr6 constitue un redresseur triphasé à diodes, non
réversible en courant. L'énergie ne peut donc transiter de la machine asynchrone
vers le réseau.
L'ensemble T1-D1 à T6-D6 constitue l'onduleur triphasé à modulation de
largeur d'impulsion (MLI) qui impose la fréquence du champ tournant et l'amplitude
du courant dans la machine.
L'ensemble Th-Rf constitue le hacheur de freinage.
Lors de la phase de freinage, la machine asynchrone fonctionne en
génératrice. Son rotor doit tourner à une vitesse supérieure à celle du champ
tournant créé par l'onduleur (hypersynchronisme).
L'onduleur fonctionne en redresseur et l'énergie est récupérée par le
condensateur de filtrage C. Ceci se traduit par une élévation de la tension aux
bornes du condensateur. Lorsque la tension atteint un seuil défini, la résistance de
freinage Rf est mise en service pour décharger le condensateur.
La commande de Th est réalisée avec un rapport cyclique variable entre 0 et
1, la dissipation maximale se faisant pour la conduction continue de Th (freinage
maximal).
En outre le condensateur fournit la puissance réactive nécessaire à la
magnétisation de la machine.

Modulation de largeur d'impulsion Patrick ABATI Janvier 2003
Page 5 / 11
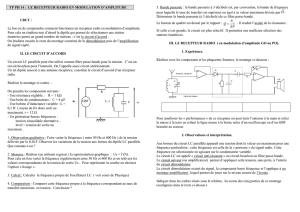
Schéma Cedrat - Circuit
Valeurs et paramètres de simulation
E : source de tension continue 600 V
Lr : inductance 223 mH
Rr : résistance 152 Ω
Lµ : inductance 485 mH
Rµ : résistance 41 Ω
T interrupteur unidirectionnel commandé
10 kΩ à l'état bloqué
0,1 Ω à l'état passant
VRRM = 800 V
Sinusoïde de référence : 50 Hz
Indice de modulation : 9
Coefficient de réglage en tension : 100%
Temps de garde : 0
Voie haute : commande MLI symétrique principale ( T1, T2, T3 )
Voie basse: commande MLI symétrique complémentaire (T1', T2', T3' )
Phase au temps 0 :
T1 et T1' : 0°
T2 et T2' : +120°
T3 et T3' : -120°
D : diode
10 kΩ à l'état bloqué
0,1 Ω à l'état passant
VRRM = 1500 V
Simulation :
Initialisation du calcul à 0
Durée de la simulation non stockée : 100 ms
Durée de la simulation stockée : 30 ms
Limite de tension : 800 V
Limite de courant : 20 A
256 points par période
mH 223
50π270,2
ω
X
L
mH 485
50π2152,5
ω
X
L
:50Hz de fréquence uneAvec
Ω 246 R
Ω 41 R
R
R
µ
µ
R
µ
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%