nomenclature electrique

EQUIPE : COLLEGE DECOUR – LYCEE CHAPTAL
CONCOURS ROBORIQUE ROBOT SUIVEUR DE LIGNE 23 JIN 2004
- 1 -
1- ANALYSE FONCTIONNELLE ..................................................................... 2
2- La chaîne d’information .................................................................................. 3
Le schéma structurel ......................................................................................... 3
NOMENCLATURE ELECTRIQUE ................................................................ 4
3- La chaîne d’énergie ........................................................................................ 11
Les engrenages ................................................................................................ 11
1) Schéma : ................................................................................................... 11
3) Formule .................................................................................................... 11
5) Avantages: ............................................................................................... 11
6) Inconvénient : .......................................................................................... 11
7) Intérêt : ..................................................................................................... 11
4- LA CREATION DU CHASSIS ................................................................... 12
DEFINITION DE LA FORME ...................................................................... 12
USINAGE : Le Fraisage ................................................................................. 13
Prises d’Origine Machine : POM................................................................. 13
Edition du programme ................................................................................. 14
Prévisualisation du cycle d’usinage ............................................................. 14
5- LA CREATION DU CIRCUIT IMPRIME ................................................. 15
Réalisation Du Schéma Structurel .................................................................. 15
Réalisation Du Schéma Typonl ...................................................................... 15
6- NOMENCLATURE MECANIQUE ........................................................... 17

EQUIPE : COLLEGE DECOUR – LYCEE CHAPTAL
CONCOURS ROBORIQUE ROBOT SUIVEUR DE LIGNE 23 JIN 2004
- 2 -
1- ANALYSE FONCTIONNELLE
ACQUERIR
TRAITER
COMMUNIQUER
Ligne noire
Tension continue
comprise entre
0v et 5v
- Capteurs T.O.R
Matériels :
- Microcontrôleurs
- Modules logiques
- Circuits de commandes câblés
- Fils
ACQUERIR
TRAITER
COMMUNIQUER
CHAÎNE D’INFORMATION
ACTION
TRANSMETTRE
CONVERTIR
DISTRIBUER
ALIMENTER
CHAÎNE D’ENERGIE
Ligne noire
TRANSMETTRE
CONVERTIR
DISTRIBUER
ALIMENTER
- Pile
- Régulateur de tension à 5V
- Relais statique
- Moteur à courant continu
- Guidage en rotation
- Engrenages
Énergie
électrique
Ordres modulés
en fréquence
Énergie
mécanique
Vitesse et sens de
rotation
Énergie
électrique
Tension modulée
en fréquence
Le robot
cherche la ligne
noire
Le robot suit la
ligne noire
Tension modulée
en fréquence
Tension modulée
en fréquence

EQUIPE : COLLEGE DECOUR – LYCEE CHAPTAL
CONCOURS ROBORIQUE ROBOT SUIVEUR DE LIGNE 23 JIN 2004
- 3 -
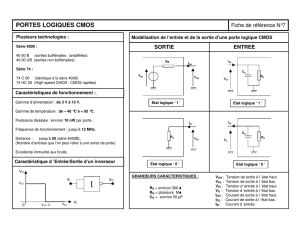
2- La chaîne d’information
Le schéma structurel
Rleds
160
Vdd
14
Vss
7
1 2
CI1[A]
40106
A2
1A3
2A4/TOCKI
3
RESET 4
VSS
5
B0/INT
6
B1
7
B2
8
B3
9
B4
10
B5
11
B6
12
B7
13 OSC1/CLKIN 16
OSC2/CLKOUT 15
VDD
14
A0
17 A1
18
CI2
pic 16F84
B1 1
B2 2
Q1
QUARTZ
C1 15p
C2 15p
R4
1K
C3 1u
LIGNE NOIRE
100K
BLANC
100K
Vdd
14
Vss
7
3 4
CI1[B]
40106
C4 10µ
E
1S3
Gnd
2
Reg1 7805
C5 1u C6 1u
&
I0
1
I1
2O3
Vdd14
Vss
7
CI3[A]
4011
&
I0
5
I1
6O4
Vdd
14
Vss
7
CI3[B]
4011
&
I0
8
I1
9O10
Vdd
14
Vss
7
CI3[C]
4011
&
I0
13
I1
12 O11
Vdd
14
Vss
7
CI3[D]
4011
R1
1k
R2
1K
GND0 V
GND0 V
GND0 V
GND0 V
GND0 V
GND0 V
GND 0 V
GND0 V
GND0 V
Vdd
+5V
Vdd
+5V
Vdd
+5V
Vdd
+5V
Vdd
+5V
Vdd
+5V
Vdd
+5V
Vdd
+5V
Vdd
+5V
+1
-2
PILE
9V
GND0 V
a
1
c
2
col 5
emm 4
CI4
OPB711
a
1
c
2
col 5
emm 4
CI5
OPB711
GND
0 V
GND
0 V
GND
0 V
M
1
2
MOTG
SERVOMOTEUR
M
1
2
MOTD
SERVOMOTEUR
SERVOMOTEURS G&D
ALIMENTER
TRAITER
COMMUNIQUER
DISTRIBUER
CONVERTIR
TRANSMETTRE
TRAITER
MEMORISER
DETECTER
REGLER ET METTRE EN FORME

EQUIPE : COLLEGE DECOUR – LYCEE CHAPTAL
CONCOURS ROBORIQUE ROBOT SUIVEUR DE LIGNE 23 JIN 2004
- 4 -
NOMENCLATURE ELECTRIQUE
Repère
Désignation
Qté
Valeur
Unité
Symbole / Réel
Caractéristiques
Commentaires
R1
R2
R4
Résistance
3
1K
Ohm
R1
/
U = R . I
U en Volts (V)
R en Ohms ()
I en Ampères (A)
Fonction :
- R1, R2 et Rleds : limiter le courant.
- R4 : maîtriser la charge du condensateur C3.
Une résistance limite le courant pouvant circuler dans le circuit. Plus la valeur de la
résistance est élevée, plus le courant a de difficultés à circuler. La résistance est
liée au courant qui la traverse et à la tension présente à ses bornes par la loi
d'Ohm. L'étude de cette loi permet d'analyser le comportement de la majorité des
circuits électroniques.
La valeur de ces résistances est indiquée au moyen de bandes de couleurs peintes
sur leur corps. Ces couleurs se lisent de gauche à droite, sachant que le côté droit
est celui qui se termine par une bande or ou argent. Les deux anneaux de gauche
donnent les deux chiffres significatifs de la valeur, le troisième anneau indique le
multiplicateur (ou le nombre de zéros à ajouter si vous préférez ) et le dernier
anneau indique la tolérance sur la valeur de la résistance.
Rleds
Résistance
1
160
Ohm
1
2
3
m
t
noir
0
0
0
x1
20%
marron
1
1
1
x10
1%
rouge
2
2
2
x102
2%
orange
3
3
3
x103
jaune
4
4
4
x104
vert
5
5
5
x105
0,5%
bleu
6
6
6
x106
violet
7
7
7
gris
8
8
8
x0.01
blanc
9
9
9
x0.1
or
x0.1
5%
argent
x0.01
10%
pas de
bague

EQUIPE : COLLEGE DECOUR – LYCEE CHAPTAL
CONCOURS ROBORIQUE ROBOT SUIVEUR DE LIGNE 23 JIN 2004
- 5 -
- BLANC
- LIGNE NOIRE
Résistance
ajustable
2
100K
Ohm
P1
/
U = P1 . I
U en Volts (V)
P1 en Ohms ()
I en Ampères (A)
Fonction :
Régler les seuils de tension en sortie des détecteurs.
C'est une résistance dont la valeur peut être modifiée en tournant un axe de
réglage. Dans les amplificateurs hi-fi ou les récepteurs radio par exemple, c'est cela
qui sert à régler le volume.
C1
C2
Condensateur
2
15pF
Farad
C1
/
Q = C . U
Q en Coulombs (C)
C en Farads (F)
U en Volts (V)
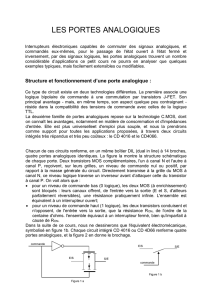
Fonction :
- C1 et C2 sont associés au quartz pour générer la base de temps indispensable au
fonctionnement du PIC.
- C4, C5 et C6 :Filtrer la tension.
- C3 associé à R4 : RAZ PIC par retard à la mise sous tension.
Un condensateur est composé de deux électrodes séparées par un isolent : le
diélectrique.
Le courant ne traverse donc pas directement un condensateur mais procède par
accumulation de charge « Q » sur les électrodes. Cette faculté à accumuler plus ou
moins de charges s'appelle la capacité du condensateur.
C3
C5
C6
Condensateur
3
1µF
Farad
C2
/
C4
Condensateur
3
10µF
Farad
T
Temps [s]
498.00m 507.00m
VG1
0.00
5.00
VRAZ PIC
0.00
4.00
Vc3
0.00
5.00
RAZ PIC
T
Temps [s]
498.00m 507.00m
VG1
0.00
5.00
VRAZ PIC
0.00
4.00
Vc3
0.00
5.00
RAZ PIC
ROBOT SOUS TENSION
 6
7
8
9
10
11
12
13
14
15
16
17
6
7
8
9
10
11
12
13
14
15
16
17
1
/
17
100%