I-Présentation du produit

1
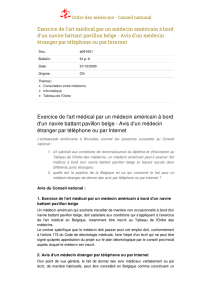
Vue de Face
Vue arrière

2
Compte rendu du TPE de ALPDOGAN Ibrahim, CHARREYRE Rémy, GARCIA Alexandre
et QUESNEL Dimitri de Terminale S4.
Sommaire
I-Présentation du produit ............................................................................................................ 3
1) Présentation générale ...................................................................................................................................... 3
2) Analyse fonctionnelle ..................................................................................................................................... 3
-Diagramme fonctionnel ................................................................................................................................. 3
-Diagramme pieuvre........................................................................................................................................ 3
-Diagramme FAST .......................................................................................................................................... 4
-Décomposition fonctionnelle en chaînes d’information et d’énergie............................................................. 5
II- Description des éléments ....................................................................................................... 6
1) Le transpondeur .............................................................................................................................................. 6
-Définition ....................................................................................................................................................... 6
-Améliorations ................................................................................................................................................ 6
-Contraintes liées au modèle utilisé ................................................................................................................ 6
2) L’électroaimant ............................................................................................................................................... 7
-Caractéristiques .............................................................................................................................................. 7
-Critères de choix ............................................................................................................................................ 7
-Branchement électronique ............................................................................................................................. 8
3) Programmation et modules associés ............................................................................................................... 9
-Présentation du PicBasic ................................................................................................................................ 9
-Module d'horloge ........................................................................................................................................... 9
-Module d'afficheur ......................................................................................................................................... 9
-Avantages du PicBasic ................................................................................................................................. 10
-Contraintes liées au PicBasic ....................................................................................................................... 10
-Le programme .............................................................................................................................................. 10
4) Détecteur Infrarouge ..................................................................................................................................... 11
5) Le capteur pluie ............................................................................................................................................ 13
-Présentation du capteur ................................................................................................................................ 13
-Mode expérimental ...................................................................................................................................... 13
-Contraintes liées au modèle utilisé .............................................................................................................. 15
III- Réalisation du prototype .................................................................................................... 15
IV- Problèmes rencontrés ......................................................................................................... 16
1) Le transpondeur ............................................................................................................................................ 16
2) L’alimentation ............................................................................................................................................... 16
V- Annexe ................................................................................................................................ 17
1) Plans .............................................................................................................................................................. 17
-Plan et justification du jeu fonctionnel de l’électroaimant ........................................................................... 17
-Plans et justification du système d’ouverture du battant .............................................................................. 17
-Rectification problème de poids sur les gond .............................................................................................. 18
-Programme ................................................................................................................................................... 19
-Plan des branchements ................................................................................................................................. 22
-Plans d’ouverture du battant ........................................................................................................................ 23
2) Remerciements ............................................................................................................................................. 27

3
I-Présentation du produit
1) Présentation générale
Nous avons repris notre projet de TPE de 1ère en essayant de l'améliorer. Au départ,
nous avions récupéré un système de transpondeur de voiture ; le système était contrôlé par un
automate industriel et l'alimentation était réalisée par un générateur de tension variable.
Notre nouveau projet quant à lui, intègre un système de transpondeur simplifié (carte de
traitement apparente), un PicBasic 1S gérant le fonctionnement et une alimentation se faisant
via un adaptateur universel.
La taille à été réduite, et notre optique a été de créer un produit "commercialisable"
prenant en compte de plus nombreux paramètres que notre précédent projet.
2) Analyse fonctionnelle
-Diagramme fonctionnel
W : 12VCC
R : Réglage des horaires d’autorisation ainsi que du fonctionnement
C : La portée du transpondeur, la force de l’aimant.
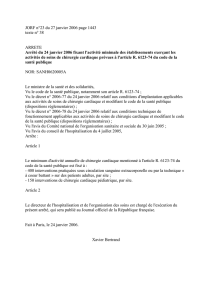
-Diagramme pieuvre
Fc 8
Fc 7
Chatière
automatique
Fc 5
Fc 4
Fc 2
Fc1
Fp 1
Contrôler
le battant
Le battant
Le battant
contrôlé
W
R
C
Maître du chat
Milieu
Prix
Energie
Esthétique
Le module
Chat
Lois
Fc 3
Fc 9
Fc 6

4
Fp 1 : Contrôler le battant
Fc 1 : Etre facilement utilisable
Fc 2 : Etre adaptable à la porte
Fc 3 : S’adapter au réseau
Fc 4 : Etre conforme à la législation
Fc 5 : Etre esthétique
Fc 6 : Adapter à l’utilisation par un chat
Fc 7 : Reconnaître un chat précis
Fc 8 : Avoir un bon rapport qualité/prix*
Fc 9 : Etre résistant au milieu extérieur et être isolant
*le rapport qualité/prix peut être amélioré par une production à grande échelle.
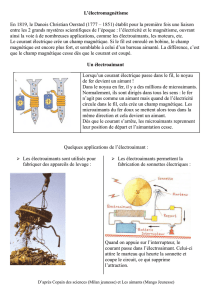
-Diagramme FAST
Contrôler
le battant
FP1
Verrouiller le
battant
FT1
Etre isolant
FC31
S’adapter au
milieu environnant
FC3
Détecter le
chat
FT2
Electroaimant
ST2
Détecter un chat précis sans contact
FT21
Intérieur/extérieur
FT22
Transpondeur
ST21
Système
infrarouge
ST22
Etre adaptable aux portes
FC32
Balais
ST31
Module à fixer
ST32
Résister au milieu extérieur
FC33
Bois +
plexiglas
ST33

5
-Décomposition fonctionnelle en chaînes d’information et d’énergie
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
1
/
27
100%