synthèse des TP2

Série de TP2 : Ce qu’il faut retenir
1 : Cinématique (rappels du cours)
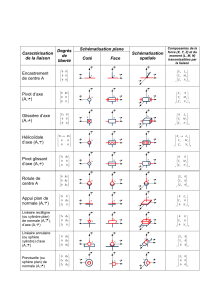
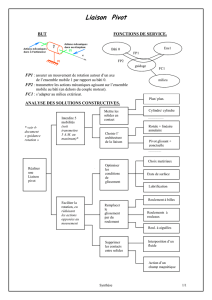
La logique d’analyse du Mvt d’un solide est la suivante :
Liaison1/2 Mouvement 1/2 Trajectoire TA1/2 direction de VA1/2
Liaison
Mouvement
Trajectoire des points du
solide
Direction des
vecteurs vitesse
Norme des
vecteurs vitesse
Pivot
(articulation)
Rotation autour du
centre du pivot
Cercles concentriques
centrés sur le centre du
pivot
Perpendiculaires au
rayon
Proportionnelle à
l’éloignement du
centre (triangle
des vitesses)
Glissière ou
pivot glissant
Translation suivant
l’axe de la liaison
Segments parallèles à
l’axe de la liaison
Parallèles à l’axe de
la liaison
Egaux
Lorsqu’il n’y a pas de liaison directe entre les deux solides considérés, on est face à un
Mouvement plan. Attention aux cas particuliers (parallélogrammestranslation circulaire).
Dans le cas du Mvt plan, il faut utiliser le CIR ou l’équiprojectivité.
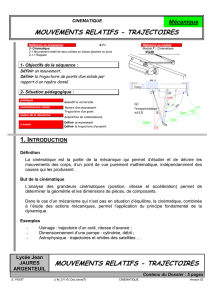
2 : Transformation de mouvement :
Utilisation du pas pour transformer un Mvt de
rotation en Mvt de translation (et vice-versa)
m/s = rad/s x m/tour / (rad/tour)
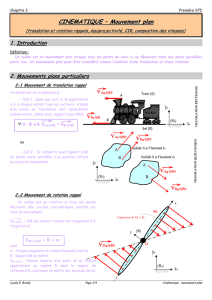
3 : Utilisation de MotionWorks :
MotionWorks n’est utilisé qu’avec un assemblage ET avec SW 2005.
Réglages de Créer un Mode
MotionW pointeur Construction/simulation
Grapheur Créer/ supprimer Lancement de simulation
(pour afficher les courbes) une liaison
Les liaisons, les pièces et les pointeurs apparaissent dans
l’arborescence de MotionWorks
Un clic droit Propriétés permet d’accéder
aux réglages des paramètres.
Les résultats (courbes) sont obtenues avec le bouton
« grapheur » uniquement lorsque la simulation est lancée !
Votre travail consiste à commenter
et utiliser les valeurs obtenues.
V = x pas / 2
Liaisons pointeurs
1
/
1
100%