Influence de la dynamique locale de contact sur la réponse

Revue. Volume X – n° x/année, pages 1 à X
Dynamique, interactions et couplages
Influence de la dynamique locale de contact sur la
réponse vibratoire globale d’un système : application au
crissement
Jean-François Brunel* — Philippe Dufrénoy*
* Laboratoire de Mécanique de Lille UMR CNRS 8107
Université de Sciences et Technologies de Lille
Cité Scientifique F-59655 Villeneuve d’Ascq
jean-francois.brunel@polytech-lille.fr
RÉSUMÉ. Le crissement, qui reste l’un des phénomènes les plus gênants de par les niveaux
sonores générés, est la conséquence de l’excitation de certains modes d’un des composants
du système ou du système couplé sous l’effet du contact frottant. Différentes approches sont
possibles pour déterminer ces modes. Dans ce travail, un calcul transitoire est mené, qui
permet la mise en évidence des mécanismes physiques mis en jeu au sein d’un contact
frottant sans introduction de singularité dans la loi de frottement en vitesse. Au travers de la
problématique du crissement en courbe, l’approche multi-échelle présentée permet de relier
le phénomène de crissement à une propagation d’ondes issues du contact.
ABSTRACT. Squeal noise is defined as noise at frequency upper than 400 Hz and occurs if the
system has a very high amplitude mechanical vibration. All systems with sliding contact are
prone to squeal: curve squeal noise, disc brake squeal, etc. It is well known that a squeal
phenomenon depends on the local kinematics in the contact patch. A multi-scale approach is
proposed to explain the mode selection mechanism. Contact surfaces waves are initiated
under pressure and sliding velocity conditions leading to self-excitation. The curve squeal
noise is treated with this approach.
MOTS-CLÉS : instabilités, ondes, propagation, crissement, contact frottant.
KEYWORDS: instability, waves, propagation, squeal, sliding contact.

2 Revue. Volume X – n° x/année
1. Introduction
Les vibrations générées à l’interface d’un contact frottant sont à l’origine de
nombreux bruits tels que le crissement, le broutement, etc. Dans les applications
ferroviaires, qu’il apparaisse en courbe ou en fin de freinage, le crissement reste une
des nuisances sonores les plus gênantes, de par son domaine fréquentiel qui couvre
une gamme de fréquence de 500 Hz à 20 kHz et les niveaux sonores qui peuvent être
supérieurs à 120 dB proche du disque ou de la roue. Un enjeu majeur dans
l’amélioration des systèmes est la réduction voire même l’élimination de ces
nuisances sonores.
Même si le problème du crissement a été largement étudié depuis les années
1930, l’origine du mécanisme déclencheur du phénomène reste mal connue. Les
premiers travaux ont porté sur le lien entre le crissement et l’évolution du coefficient
de frottement en fonction de la vitesse. Même si, par des approches discrètes, il est
possible de mettre en évidence des conditions d’apparition des instabilités (de type
« stick-slip »), ce lien n’a jamais pu être clairement établi expérimentalement de par
la difficulté à caractériser l’évolution du coefficient de frottement en fonction de
vitesse, de la pression, de la température, de l’humidité, etc. Dans les années 1960,
Spurr a pu montré l’influence de la géométrie des corps en contact dans le
déclenchement des instabilités (Spurr, 1961). L’introduction du couplage entre les
dynamiques normales et tangentielles au frottement conduit à la mise en évidence
d’instabilités même avec un coefficient de frottement constant (« sprag-slip »). Du
point de vue phénoménologique, le crissement est initié par une instabilité issue des
forces de frottement qui conduit à des vibrations auto-entretenues (Kinkaid et al,
2003).
D’autres études théoriques ont pu montré que le crissement correspond à une
coalescence de modes propres du système qui deviennent complexes, avec une partie
réelle non nulle traduisant un comportement instable. On parle alors d’instabilité par
flottement («flutter instability ») (Moirot et al, 2002).
Deux difficultés demeurent: la détermination précise des conditions d’occurrence
du crissement et la raison de l’excitation de certains modes au détriment d’autres.
La motivation de cette étude réside dans le développement d’approches
numériques visant à prédire les modes crissants. L’accent est mis sur l’identification
des interactions des phénomènes physiques prépondérant mis en jeu. On privilégie
alors une approche transitoire qui permet une description de la dynamique locale de
contact contrairement à une approche fréquentielle qui ne permet que de déterminer
les modes instables du système couplé.
Il est clairement mis en évidence que le crissement trouve son origine dans l’aire
de contact. Les approches classiques, de type « stick-slip » et « sprag-slip » ne
permettent pas de décrire précisément les phénomènes dans l’aire de contact. Il est
alors nécessaire d’introduire un modèle décrivant le comportement dynamique local
basé sur une approche en glissement stationnaire. Ces travaux s’appuient sur

Instabilités de contact et conséquences 3
l’existence de vibrations auto-entretenues au sein de l’interface de contact sous la
forme d’ondes d’adhérence-glissement-décollement obtenues même avec un
coefficient de frottement local constant et uniforme (Adams, 1995), (Linck et al,
2003), (Brunel et al, 2006). Cette excitation se traduit à l’échelle macroscopique par
une variation du coefficient de frottement global dans les cas où le crissement
apparaît. Contrairement donc aux approches classiques, la variation du coefficient de
frottement avec la vitesse n’est plus utilisée comme une source d’excitation mais est
vue comme une conséquence des instabilités. Une autre conséquence est étudiée ici
grâce à la prise en compte de la réponse dynamique de la structure : il s’agit de
l’identification des modes mis en jeu dans le crissement.
2. Application à la problématique du crissement en courbe
Lors du passage en courbe de faible rayon de certains métros ou tramways, un
bruit de crissement est quasi-systématique : il est caractérisé par un spectre de raies
compris entre 400 et 10 kHz, les niveaux sonores sont voisins de 130 dB proche de
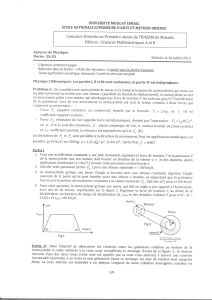
la roue (Vincent et al, 2004). La figure 1 présente un spectre de crissement relevé
lors du passage de quatre trains « Corails » successifs. Quatre fréquences excitées
peuvent être relevées qui correspondent à l’excitation des modes de flexion hors du
plan de la roue de 2 à 5 diamètres nodaux (Fvb n-0).
Plusieurs pistes ont été envisagées pour expliquer l’origine du crissement, la plus
vraisemblable est à relier à un glissement latéral de la roue sur le rail lors du passage
en courbe de par la conception des bogies à essieux rigides. Cependant le mécanisme
de sélection des modes reste à expliquer. En effet, une roue ferroviaire possède une
très forte densité modale; une simulation vibro-acoustique de la roue sous excitation
latérale harmonique met en évidence 13 modes candidats alors que 4 à 5 modes sont
réellement excités dans la gamme de fréquence de 0 à 4000 Hz (figure 3) (Brunel et
al, 2004).
Figure 1. Spectre acoustique de crissement et réponse acoustique d’une roue Corail
Niveau de
pression
acoustique (dB)
Mesures expérimentales
Simulation vibro-acoustique
Mode
Fvb 3-0
Fréquence (Hz)

4 Revue. Volume X – n° x/année
L’excitation est liée au glissement latéral de la roue sur le rail que l’on propose
de modéliser en intégrant une discrétisation multi-échelle : description fine dans
l’aire de contact permettant le déclenchement d’instabilités de contact et prise en
compte des géométries réelles pour étudier le comportement vibratoire et la
propagation d’ondes dans la roue (élément rayonnant dans le cas du crissement en
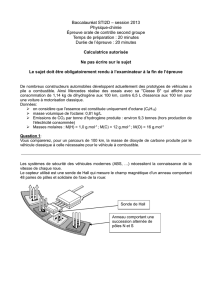
courbe). Le modèle est donc composé d’une roue considérée comme un solide
élastique en glissement latéral sur un rail supposé rigide (figure 2). L’approche
nécessite des zones de contact raffinées avec une taille d’éléments voisine de 0.5
mm. Le coefficient de frottement à l’interface est supposé constant et uniforme. La
roue soumise au poids du véhicule (P =100 kN) glisse latéralement sur le rail à
vitesse constante (V = 0.05 m/s). Le coefficient de frottement à l’interface est
supposé constant et uniforme (µ = 0.3).
Le contact à l’interface est géré par un algorithme de pénalisation. Compte tenu
des phénomènes mis en jeu, une méthode de résolution explicite est adoptée, le pas
de temps de calcul est choisi afin de respecter les critères de stabilité (t = 5.10-8 s).
Figure 2. Maillage de la roue et du rail et conditions aux limites
Le frottement entre les deux corps engendre des instabilités de contact au niveau
de la zone de contact qui se caractérise par la formation d’ondes adhérence-
glissement-décollement. Ces instabilités sont à l’origine de vibrations dans les
composants du système.
Cinématique locale :
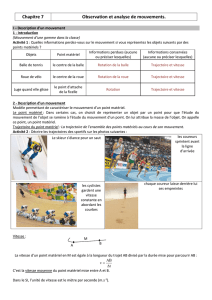
L’instabilité se caractérise par la formation d’ondes adhérence-glissement-
décollement. La figure 3 présente la trajectoire d’un point de la zone de contact et
son cycle limite dans le plan des phases. Le cycle limite comprend une phase
d’adhérence (déplacement latéral à la vitesse de glissement), de glissement
(déplacement dans le sens opposé du glissement) et une phase de décollement
(déplacement normal à la surface de contact non nul). Compte tenu de l’algorithme
de pénalisation adopté et surtout des géométries des surfaces en contact, il est très
difficile de différencier les zones de glissement des zones de décollement.
P = 100 kN
V = 0.05 m/s

Instabilités de contact et conséquences 5
Figure 3. Cinématique d’un point de la zone de contact
Comportement vibratoire global :
Ces instabilités sont à l’origine de vibrations dans la roue. La figure 4a présente
un spectre vibratoire d’un point du bandage de la roue. Les résultats mettent en
évidence une excitation des quatre premiers modes de type Fvb (flexion du bandage
de la roue), avec un très bon accord avec les résultats expérimentaux présentés sur la
figure 3. L’étude transitoire permet de mettre en évidence un train d’ondes, issues du
contact, qui se propage le long du bandage de la roue venant exciter les modes Fvb.
La figure 4b présente l’évolution de la déformée de la roue à différents instants.
L’onde, initiée par la transition de l’adhérence au glissement, se déplace
circonférentiellement le long du bandage de la roue. La visualisation de la
propagation des ondes permet d’interpréter les modes excités comme ceux ayant une
déformée localisée sur le bandage de la roue.
Figure 4. a :Spectre en vitesse d’un point du bandage de la roue
b : Propagation des ondes à la surface de la roue
Déplacement latéral (m)
Déplacement radial (m)
-0.00036 -0.00034 -0.00032 -0.0003 -0.00028
5E-05
5.5E-05
6E-05
6.5E-05
7E-05
7.5E-05
Déplacement latéral (m)
Vitesse latérale (m/s)
-0.00036 -0.00034 -0.00032 -0.0003 -0.00028
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1
0.11
0.12
Fréquence (Hz)
Vitesse (dB réf 5e-8 m/s)
0 1000 2000 3000 4000
55
60
65
70
75 Vitesse latérale = 0.05 m/s
Fréquence (Hz)
Vitesse (dB réf 5e-8 m/s)
0 1000 2000 3000 4000
55
60
65
70
75 Vitesse latérale = 0.1 m/s
Fréquence (Hz)
Vitesse (dB réf 5e-8 m/s)
0 1000 2000 3000 4000
55
60
65
70
75 Vitesse latérale = 0.05 m/s
Fréquence (Hz)
Vitesse (dB réf 5e-8 m/s)
0 1000 2000 3000 4000
55
60
65
70
75 Vitesse latérale = 0.1 m/s
150
140
130
120
110
Fréquence (Hz)
Vitesse (dB réf 5e-8 m/s)
0 1000 2000 3000 4000
55
60
65
70
75 Vitesse latérale = 0.05 m/s
Fréquence (Hz)
Vitesse (dB réf 5e-8 m/s)
0 1000 2000 3000 4000
55
60
65
70
75 Vitesse latérale = 0.1 m/s
Fréquence (Hz)
Vitesse (dB réf 5e-8 m/s)
0 1000 2000 3000 4000
55
60
65
70
75 Vitesse latérale = 0.05 m/s
Fréquence (Hz)
Vitesse (dB réf 5e-8 m/s)
0 1000 2000 3000 4000
55
60
65
70
75 Vitesse latérale = 0.1 m/s
150
140
130
120
110
Fvb 1-0
Fvb 4-0
Fvb 2-0
Fvb 3-0
Instant t1 :
Instant t2 (>t1) :
Instant t3 (>t2) :
(a)
(b)
 6
6
1
/
6
100%