JESTIN Yann HUGIN Marie-Charlotte 22/09/05

JESTIN Yann
HUGIN Marie-Charlotte
22/09/05 – groupe : A3
----------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------
PS22 Automne 2005
PS22
TP III
CHANGEMENT DE REFERENTIEL, LOIS DE NEWTON
But du TP
Le mouvement d’un objet est régi par des lois mécaniques, mais il est important pour
l’observateur de bien choisir son référentiel pour toutes les expliquer, c’est bien sûr le cas pour
les forces d’inertie engendrées par un mouvement dans un référentiel lui-même mobile.
Après une première approche permettant de se familiariser avec les outils mis à
disposition (étude d’un mouvement simple)et de leur précision, nous étudierons le mouvement
de deux solides afin d’aborder les notions de décomposition de vitesse et de référentiel mobile ;
pour terminer, à l’aide de deux solides liés dans un référentiel (accolés), nous tenterons de mettre
en avant les effets d’un changement de masse (déplacement du centre de masse) sur les
mouvements absolus et relatifs.
Matériel
Pour cela nous disposons :
- d’une table à coussin d’air sur laquelle est positionné un repère,
- de mobiles autoporteurs repérables par des points de couleurs situés en leur centre,
- d’un micro-ordinateur équipé pour l’expérimentation de Cinéris (acquisition et montage
vidéo) et Microsoft Excel (tableur avec modélisation des données),
- d’une caméra (zoom et focus automatique),
- et d’une balance à affichage digital avec une précision de 1g.
I/ Etude d’un mouvement rectiligne uniforme
Cinéris est un logiciel de capture et montage vidéo ; cette première partie nous permet
d’acquérir les premières bases d’utilisation et le logiciel Aviméca2 nous offre la possibilité
d’évaluer la précision de mesure.
Pour cela nous disposons d’une séquence préenregistrée retraçant le parcours rectiligne
et uniforme d’un mobile autoporteur dont le centre de gravité est repéré par un point bleu.
a) Nature de la trajectoire :
La représentation graphique de x1(t) est une droite légèrement décroissante et celle de
y1(t) est une droite croissante ; toutes deux passent par l’origine. Cette monotonie indique une
trajectoire du mobile autoporteur rectiligne uniforme.
L’utilisation du logiciel Aviméca2 nous a permis d’évaluer les paramètres :
- sensibilité horizontale = 1,49 x 10-3 m/pxl - sensibilité verticale = 1,41 x 10-3 m/pxl
b) Vitesse et de l’accélération moyenne du centre de gravité : (cf. annexe 1)
A l’aide de Microsoft Excel, nous évaluons les vitesses horizontales et verticales
instantanées du mobile à différents instants.

JESTIN Yann
HUGIN Marie-Charlotte
22/09/05
----------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------
PS22 Automne 2005
2
Par la suite, nous pouvons calculer une valeur de la norme de la vitesse grâce à la
relation :
Norme de la vitesse = √ (x’1² + y’1²)
Soit v = 6,03 x 10-1m/s (valeur moyenne)
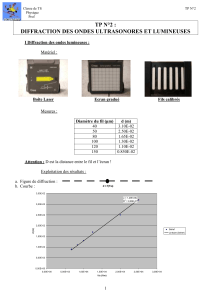
Il nous est alors possible de tracer un graphe représentant la norme de la vitesse en
fonction du temps. On y applique ainsi une courbe de tendance linéaire et on en déduit, grâce au
coefficient directeur de la pente (y = 0,0215x + 0,5923), une valeur moyenne de l’accélération :
2,15*10-2 m/s2.
II/ Etude de deux mouvements rectilignes uniformément accélérés
Cette deuxième étude nous permet de nous positionner dans l’absolu (référentiel fixe) et
dans un référentiel mobile (autoporteur 1)
Nous appellerons respectivement M1 et M2 les masses des mobiles A1 et A2, m1 et m2
leur masse de traction, v1 et v2 la norme de leurs vitesses et a1 et a2 leurs accélérations.
Données : M1 = 1115 0.5 g et M2 =1114 0.5 g
m1 = 40 0.5 g et m2 = 59 0.5 g
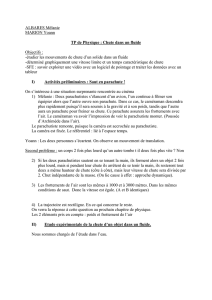
a) Vitesse et de l’accélération moyenne des autoporteurs : (cf. annexe 2)
Excel nous permet de calculer les vitesses des mobiles selon les composantes x et y ainsi
que leurs normes v1 et v2 à partir desquelles nous pouvons visualiser l’évolution des mouvements
respectifs en appliquant aux nuages de points une tendance linéaire. Nous pouvons ainsi nous
assurer que les fonctions sont linéairement croissantes.
Nous déduisons à partir des résultats l’accélération des mobiles (a = coefficient de pente
de vitesse = f( temps ))
Il vient : a1expérimental = 2,98 *10-1 m/s2 et a2expérimental= 4,91*10-1 m/s2. Le calcul de l’incertitude
sur l’accélération théorique donnée par
(1)
est le suivant :
(méthode progressive de la dérivation partielle)
Calculons l’accélération théorique selon la formule (1) :
- Pour le mobile A1 : a1 théorique = 40*9,81 / (40 + 1115) = 3,40*10-1 m/s2
- Pour le mobile A2 : a2 théorique = 59*9,81 / (59 + 1114) = 4,93*10-1 m/s2
Erreurs sur les accélérations :

JESTIN Yann
HUGIN Marie-Charlotte
22/09/05
----------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------
PS22 Automne 2005
3
- Erreur sur A1 : - Erreur sur A2 :
a= athéorique – aexp a= athéorique – aexp
= 4,93*10-1 – 4,91*10-1 = 3,40*10-1 - 2,98*10-1
= 0,02 m/s² = 0,042 m/s²
a/a=0,02/4,93*10-1*100 a/a=0,042/3,40*100
=4,1% =1,2%
Ces erreurs relativement négligeables nous permettent de valider le modèle théorique proposé.
b) Etude du mouvement relatif de A2 par rapport à A1 : (cf. annexe 3)
En utilisant les déplacements relatifs sur l’axe des abscisses et l’axe des ordonnées, on
obtient la norme de la vitesse relative de A2 par rapport à A1 :
t
Vitesse A1
Vitesse A2
Vitesse A1 - Vitesse A2
Vitesse A2 par rapport à A1
0,440s
0,087 m/s
0,156 m/s
0,069 m/s
0,068 m/s
On vérifie donc bien que cette vitesse peut être assimilée à la soustraction des vitesses des
deux mobiles.
III - Etude du mouvement de deux mobiles accolés
Le système étudié est formé de deux mobiles accolés (A1 et A2) à l’aide d’une bande velcro
de masses considérées identiques pour la première manipulation (M=1115 et 1114g), puis de
masses différentes pour la seconde manipulation (M1=1115g, M2=1472g), afin de mieux
appréhender les effets de déplacement du centre de masse.
Une vitesse v0 est imprimée au mobile A2 grâce à un lanceur ; on étudie donc le mouvement
de chaque centre d’inertie. Le système est alors animé d’un mouvement de rotation et de
translation.
a) Première manipulation, masses identiques : (cf. annexe 4)
Le traitement numérique de l’acquisition nous permet de modéliser le mouvement et de
calculer la vitesse du centre de gravité du système qui vaut : 8,49*10-2 m/s. On vérifie alors
qu’elle est bien constante.
Nous étudions le mouvement relatif de A2 par rapport à G, et nous notons que la norme de
la vitesse relative de A2 par rapport à G est pratiquement constante et vaut 7,10*10-2 m/s. De
plus la distance entre ces deux points matériels reste constante. Nous en concluons que le
mobile M2 décrit une trajectoire circulaire uniforme par rapport au centre de gravité du système.

JESTIN Yann
HUGIN Marie-Charlotte
22/09/05
----------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------
PS22 Automne 2005
4
b) Deuxième manipulation, masses différentes : (cf. annexe 5 et préparation)
Par le même traitement nous modélisons le mouvement et calculons la vitesse du centre de
gravité du système qui cette fois vaut : 9,65*10-2 m/s. On vérifie bien qu’elle est également
constante.
Nous avons ensuite étudié le mouvement relatif de A2 par rapport à G, et nous avons encore
remarqué que la norme de la vitesse relative de A2 par rapport à G est pratiquement constante et
vaut 8,79*10-2 m/s. De plus la distance entre ces deux points matériels reste constante. Nous en
concluons que le mobile M2 décrit une trajectoire circulaire uniforme par rapport au centre de
gravité du système.
En augmentant la masse M2, on déplace le centre de masse vers le mobile 2 ;
intuitivement, on sent que l’effet d’inertie (ex : fronde) va engendrer une vitesse d’entraînement
plus importante. La théorie et l’expérience confirment cette idée : (vG’/vG)=4/3=1.33 (théorie) et
9.65/8.49=1.14(pratique)
Cependant, d’après la décomposition théorique, la vitesse relative de A2/G devrait être plus
faible (V2’/V2)=2/3=0.66 mais on trouve 8.79/7.10=1.24. La théorie suppose que la vitesse
initiale impimée v(A2)/Rfixe est la même dans les deux expériences. Or ici, n’arrivant pas à faire
partir le système correctement, nous avons été contraints de changer la tension ressort. Bien
évidemment, dans ces conditions la pratique ne peut plus confirmer la théorie. Nous avons donc
pu mettre en évidence qu’une partie des effets de changement de centre de masse.
Conclusion :
Cette séance de travaux pratiques est très complète, elle nous permet d’aborder les
premières lois mécaniques et notion de référentiels (PS21) de façon efficace. Les outils mis à
disposition permettent de visualiser les systèmes dans des conditions optimales (nous nous
affranchissons par exemple des frottements les plus gênants, les frottements solides). Ainsi nous
pouvons mieux appréhender le comportement de systèmes livrés à eux-mêmes avec une vitesse
initiale imprimée (exp 3) comme les satellites mis en orbite ou une contrainte constante (exp 2).
Nous avons pu vérifier expérimentalement la décomposition des vitesses et partiellement les
effets du déplacement de centre de masse sur un mouvement complexe.

JESTIN Yann
HUGIN Marie-Charlotte
22/09/05
----------------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------------------------------
PS22 Automne 2005
5
ANNEXES :
Annexe 1 :
Annexe 2 :
courbe représentant la norme de la vitesse en fonction du
temps
y = 0,0215x + 0,5923
R2 = 0,1123
5,50E-01
5,60E-01
5,70E-01
5,80E-01
5,90E-01
6,00E-01
6,10E-01
6,20E-01
6,30E-01
0,00E+00 5,00E-01 1,00E+00
temps t
norme de la vitesse v
Série1
Linéaire (Série1)
y1 = 0,2981x - 0,0113
y2 = 0,4914x - 0,013
-0,1
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,00E+00 5,00E-01 1,00E+00 1,50E+00
t
v
Série1
Série2
Linéaire (Série1)
Linéaire (Série2)
Norme de la vitesses des mobiles 1 et 2
 6
7
8
6
7
8
1
/
8
100%