(4e) Physique 2è partie

- 1 -
3. 8. Exercices
1. Un corps de 10 kg est entrainé sous l’action d’une force de 20 N. Calculez la vitesse
acquise par le corps après 2 s. (Rép. 4m/s)
2. a) Calculez la force de freinage, supposée constante, qui agit sur une voiture d’une tonne
s’il faut 15 s à celle-ci pour s’arrêter sur une route horizontale quand elle roule à
108 km/h. (Rép. -2000N)
b) Quelle est la distance de freinage ? (Rép. 225 m)
3. Quelle est la force appliquée par les freins d’une voiture de 1200 kg lancée à 80 km/h pour
qu’elle puisse s’arrêter sur 100 m de distance ? (La décélération est supposée constante
et la route horizontale).
4. Un camion de 6 tonnes démarre avec une accélération constante sur une route horizontale
et rectiligne en parcourant 400 m en 40 s. Les frottements équivalent à une force constante
égale à 4% du poids du véhicule. Calculez l’intensité et la force déployée par le moteur
le long du trajet.
5. La masse d’une balle de fusil est de 15 g. Elle sort du canon long de 70 cm avec une
vitesse de 600 m/s. Considérant les frottements négligeables, calculez :
a) l’intensité de la force de propulsion de la balle
b) la durée du parcours de la balle dans le canon.
6. Un proton (m = 1.67.10-27 kg) parcourt un accélérateur linéaire de particules et subit une
force constante de 2.5.10-24 N. Calculez son accélération.
7. Un dragster doit atteindre une vitesse de 144 km/h après un parcours de 30 m sur une
route horizontale. Dans ce but, son moteur exerce une force moyenne constante de
80 000 N durant tout le parcours. Les frottements, non négligeables, sont évalués à
1000 N. Calculez la masse du dragster.
8* Un véhicule de 50 tonnes démarre sur une voie horizontale. Le conducteur impose
d’abord à la machine une accélération constante de 2 m/s2. Après 100 m de course, il
coupe le moteur et le véhicule arrive sans freiner à destination avec une vitesse nulle.
Les frottements produisent le même effet qu’une force de 5000 N. Calculez :
a) la durée de l’accélération
b) la vitesse acquise après 100 m de course
c) la force exercée par le moteur pendant le démarrage
d) la décélération durant la seconde phase,
e) la durée de cette décélération
f) la distance parcourue au cours du ralentissement
g) la vitesse moyenne sur l’entièreté du parcours.
Réalisez le graphe de l’accélération en fonction du temps.
9 Un avion de 9 tonnes roule sur sa piste d’envol. Partant du repos, il doit parcourir une
distance de 1250 m avant de décoller avec une vitesse de 360 km/h.
a) Quelle est son accélération moyenne et la grandeur de sa force efficace ?
b) Quelle partie de la force efficace est utilisée pour vaincre les frottements des roues
et de l’air ; sachant que le moteur exerce une force moyenne de 70 kN.
10. Un train de 700 tonnes démarre avec une accélération de 0.15 m/s2.
a) Quelles sont la vitesse du train après 10 s et la distance qu’il a alors parcourue ?
b) Quelle est la force minimale que la locomotive doit déployer si les frottements sont
négligeables ?
c) Quelle est cette force quand il est tenu compte d’une force résistante pour l’ensemble
du train dont le coefficient de frottement statique μs = 0.1 ?

- 2 -
REPONSES
1. 4 m/s
2. a) – 2000 N b) 225 m
3. -3750 N
4. 5400 N
5. a) 3857 N b) 0.0023 s
6. 1497 m/s2
7. 2962.5 kg
8. a) 10 s b) 20 m/s c) 105 000 N d) -0.1 m/s2 e) 200 s f) 2000 m g) 10 m/s
9. a) 4 m/s2 36 kN b) 48.6 %
10. a) 5.4 km/h 7.5 m b) 105 000 N c) 805 000 N
1. TROISIÈME LOI DE NEWTON : PRINCIPE DE L’ACTION
ET DE LA RÉACTION.
4.1 Introduction expérimentale
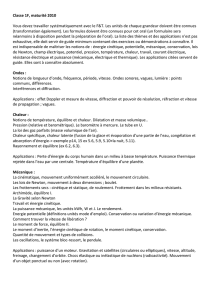
Première expérience : Envisageons la situation
suivante : un élève au repos est en
équilibre sur un skateboard. Il s’élance vers l’avant, le
skateboard est propulsé vers
l’arrière. Puisqu’il est mis en mouvement
et qu’il a donc accéléré, l’élève a dû subir
une force. Cette force F1,2 est celle exercée
sur l’élève par le skateboard. Initialement
au repos, celui-ci est mis en mouvement
par une force F2,1 exercée sur lui par
l’élève.
Deuxième expérience : Considérons deux élèves qui se font face, munis chacun d’un
dynamomètre. Ils se tiennent par les extrémités des crochets des dynamomètres et
tirent leur dynamomètre vers eux. Ils s’immobilisent alors dans cette position où les
dynamomètres sont étirés et nous procédons à une lecture des valeurs qui y sont
indiquées. Ces valeurs sont rigoureusement identiques.
L’analyse de cette deuxième expérience montre que l’intensité de l’action F1,2 exercée
par l’élève 1 sur l’élève 2 est égale à l’intensité de la réaction F2,1 exercée par l’élève 2
sur l’élève 1.
4.2 Enoncé du principe
Sur base des exemples précédents, énonçons le principe de l’action et de la réaction :

- 3 -
« Toute force d’action F1,2 exercée par un corps 1 sur un corps 2 provoque simultanément
dans la même direction, une force de réaction F2,1, exercée par le corps 2 sur le corps 1, de
même intensité que la force d’action et de sens opposé. »
4.3 Applications
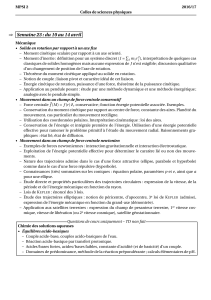
Exemple 1 : Le cas d’un lustre (corps 1) suspendu au plafond (corps 2) d’un living
est une illustration statique du principe (figure 2.24). Le lustre exerce une action de
traction F1,2 sur son point d’attache, crochet de suspension transmet la réaction F2,1 qui
empêche le lustre de tomber.
Exemple 2 : Le cas d’une personne (corps 1) assise sur une chaise (corps 2) est aussi
une illustration statique du principe (figure 2.25). La personne exerce une action de
poussée (F1,2) sur sa chaise. La réaction F2,1 de la chaise empêche la personne de passer à
travers d’elle.
Exemple 3 : Le cas d’une bille (corps 1) posée sur une table de billard (corps 2) est
encore une illustration statique du principe (figure 2.26). La bille exerce une action de
poussée F1,2 qui empêche la bille de s’enfoncer.
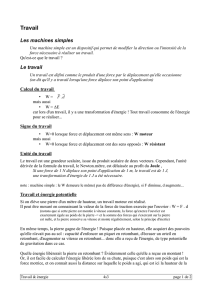
Exemple 4 : Le cas d’un tir de canon est une illustration dynamique du principe
(figure 2.27). Le canon (corps 1) par l’intermédiaire des gaz brûlés exerce une action
de poussée F1,2 qui propulse l’obus (corps 2). La réaction F2,1 se manifeste par le recul du
canon. Elle traduit la poussée de l’obus sur les gaz et le fond du canon.
Exemple 5 : Le cas d’un gymnaste (corps 1) sautant un tremplin (corps 2) est aussi
une illustration dynamique du principe (fig 2.28). Le gymnaste exerce, par l’intermédiaire
de ses pieds, une action de poussée F1,2 sur la toile tendue. Simultanément, le tremplin
réagit en restituant l’impulsion sous la forme d’une réaction F2,1 exercée vers le haut sur le
corps du gymnaste.
Exemple 6 : Le cas d’une fusée qui décolle est une autre illustration dynamique du
principe (figure 2.29). La fusée (corps 1) exerce une action F1,2 qui expulse les gaz (corps

- 4 -
2) vers le bas. Les gaz exercent une réaction F2,1 vers le haut permettant à la fusée de
s’élever.
Exemple 7 : Le cas du tourniquet hydraulique est encore une illustration
dynamique du principe (figure 2.30). L’écoulement de l’eau (corps 1) par les orifices
symétriques constitue l’action F1,2 réalisé cette fois par un couple de forces. Le
tourniquet (corps 2) réagit par un couple de réactions F2,1 qui provoque sa rotation
dans le sens opposé aux jets d’eau.
Exemple 8 : L’interaction gravifique entre la Terre (corps 1) et la Lune (corps 2)
fournit une illustration de forces s’exerçant à distance (figure 2.31). Newton a
établi que les intensités des forces exercées par chaque corps sur l’autre sont
égales. Aucune de ces deux forces n’étant antérieure à l’autre, il n’est( pas
possible dans ce cas de distinguer l’action de la réaction.
Exemple 9 : L’interaction magnétique de deux aimants voisins disposés de telle
sorte que le pôle Nord du premier (corps 1) soit voisin du pôle Sud du second
(corps 2) fournit un autre exemple de forces s’exerçant à distance. Nous pouvons
réaliser facilement cette expérience en déposant chaque aimant sur 2 craies (figure
2.32). Pour une distance suffisamment faible, les deux aimants se déplacent l’un
vers l’autre. L’attraction est immédiate, l’action et la réaction sont simultanées et
indiscernables.

- 5 -
2. LOI D’ADDITION DES FORCES
5.1 Introduction
Jusqu’à présent, nous avons étudié le mouvement d’un corps soumis à l’action d’une
force unique. Dans la presque totalité des cas, plusieurs forces agissent simultanément
sur un même corps indéformable. Il est alors commode de composer toutes ces forces,
c’est-à-dire de les remplacer sur un schéma par une force unique appelée la résultante
des forces considérées. Celles-ci sont appelées les composantes.
La résultante d’un ensemble de forces est la force unique qui produit le même effet que
l’ensemble des forces composantes.
5.2 Composition de 2 forces de même ligne d’action, même intensité et de
sens opposés.
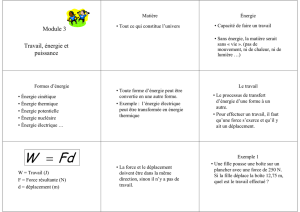
Commençons par l’expérience schématisée ci-
dessous (figure 2.33). Un solide S matérialisé
par une plaque en carton, repose sans
frottement sur une table horizontale. Une
force F1 est appliquée au solide S. Pour
maintenir ce corps au repos, il faut lui
appliquer une force F2 de même ligne d’action,
de même intensité et de sens opposé.
Le diagramme des forces propose l’analyse
vectorielle de la situation (figure 2.34). Nous
pouvons énoncer la conclusion suivante :
Un corps soumis à l’action de deux forces de même ligne d’action, de même intensité et
de sens opposés reste au repos.
Dans ce cas, la résultante Fr des forces appliquées au solide est nulle. Fr = F1 + F2 = 0
5.3 Composition de forces concourantes
Des forces s’appliquant sur un corps sont dites concourantes si leurs directions se
coupent en un même point.
Commençons à nouveau par une expérience et composons deux
forces concourantes (fig. 2.35).
Un solide S de masse négligeable est soumis à l’action de deux
forces concourantes F1 et F2. L’expérience montre que pour
maintenir le corps au repos, il faut lui appliquer une troisième
force F3 concourantes aux deux autres et située dans le plan
déterminé par F1 et F2.
En choisissant une échelle appropriée, nous pouvons réaliser le
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
1
/
31
100%