PRESENTATION GENERALE

DOC REPONSE TP TONDEUSE 2 SSI
Lycée Louis Payen
1
DOCUMENT REPONSE TP TONDEUSE 2
TONDEUSE RL550
Problématique :
« Comment se fait la commande des moteurs de propulsion de la tondeuse »
I- Mise en situation
1- On s’intéresse à la commande du moteur gauche :
Tracer en rouge le sens du courant de puissance dans le moteur pour le sens 1 (correspondant aux
transistors MOS Q710 et Q714 saturés)
Tracer en bleu le sens du courant de puissance dans le moteur pour le sens 2
(correspondant aux transistors MOS Q709 et Q715 saturés)
Note : partir du +24V vers la masse
2- Repérer sur la carte électronique du robot les transistors de puissance (Q710,Q714,Q709
Q715) correspondant à la commande du moteur gauche et ceux correspondant à la
commande du moteur droit (Q702 , Q703 , Q706, Q707)

DOC REPONSE TP TONDEUSE 2 SSI
Lycée Louis Payen
2
II- Algorithme de commande moteur
L’algorithme pour piloter le moteur pour 1 sens de rotation est donné ci-dessous :
Algorithme
Programme
Initialiser PORTA à 0
Répéter
Mettre A0 à 1
Temporiser 5s
Mettre A0 à 0
Temporiser 3s
Toujours
PORTA = 0
Répéter
PORTA.0 = 1
tempo (5000)
PORTA.0 = 0
Tempo (3000)
Toujours
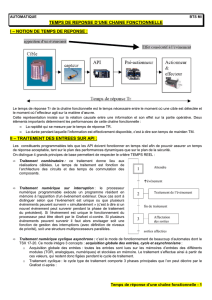
A l’aide de l’oscilloscope + sonde différentielle, visualiser la tension aux bornes du
moteur et représenter le signal sur votre document réponse.
Indiquer l’amplitude du signal, sa période T, sa fréquence F, le temps haut noté Th.
Calculer le rapport cyclique noté Rc = Th/T.
Graphe :
Umot
t

DOC REPONSE TP TONDEUSE 2 SSI
Lycée Louis Payen
3
Influence de la période ( ou fréquence )
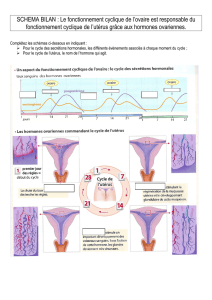
Influence de la fréquence sur le comportement du moteur :
Influence du rapport cyclique
Observer la roue et conclure quant à l’influence du rapport cyclique sur le
comportement du moteur :
Compléter le tableau suivant : (Période ne change pas = 10 ms)
Th = 2ms Th = 5ms Th = 8ms Th = 10ms
Rapport
cyclique
1/5
1/2
4/5
1
Vitesse
linéaire de la
roue en m/s
Tracer la courbe V = f(Rc) (Vitesse en fonction du rapport cyclique )
Conclusion ? :
Vitesse
Rapport Cyclique

DOC REPONSE TP TONDEUSE 2 SSI
Lycée Louis Payen
4
Changement du sens de rotation de la roue.
Compléter le programme ci-dessous en fonction de l’algorithme
Algorithme
Programme
Répéter
Mettre A1 à 1
Temporiser 5s
Mettre A1 à 0
Temporiser 3s
Toujours
Répéter
……..
tempo (5000)
……..
Tempo (3000)
Toujours
Relever sur votre feuille le signal moteur
Comparer avec le signal de la question II-1 et conclure
Synthèse.
Indiquer en rouge sur le schéma le sens du courant dans le moteur lorsque A0=1 et
A1 = 0
(partir du +24V)
Indiquer en bleu sur le schéma le sens du courant dans le moteur lorsque A0=0 et
A1=1
Pour modifier la vitesse de rotation du moteur, on agit sur la :
- Fréquence du signal de commande ou son rapport cyclique ?
Pour piloter le moteur, on utilise une structure de pont en …… Lorsque les transistors
……. et ……. sont saturés, le moteur tourne dans le sens 1.
Lorsque les transistors …….. et …… sont saturés, le moteur tourne dans le sens 2.
Pour modifier la vitesse du moteur, le microcontrôleur doit générer sur ses sorties un
signal carré modulé en largeur d’impulsion : en agissant sur le ………………….. du
signal, on fait varier la vitesse.
La ……………….. du signal devra être suffisamment élevée pour garantir un
fonctionnement en continu du moteur (pas d’ à coups)
Umot
t
1
/
4
100%