12aolin

MPI - Quadripôles actifs utilisant un amplificateur opérationnel en régime linéaire page 1 / 5
Quadripôles actifs utilisant un amplificateur
opérationnel en régime linéaire
I - PRESENTATION DE l’AMPLIFICATEUR OPERATIONNEL (A.0.)
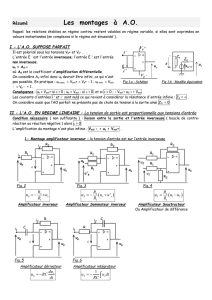
1. Description
L’A.O. est un circuit intégré (association d’un grand nombre de résistances, de transistors et de
condensateurs) à 8 broches présenté dans un petit boîtier plastique.
Pour fonctionner, l’A.O. doit être alimenté par une source de tension continue symétrique. Le point milieu (de
potentiel V = 0) définit la masse ou référence M du montage.
Sur les 8 broches de l'A.O., seulement 5 sont utilisées :
* broche 2 notée E - : entrée inverseuse ;
* broche 3 notée E + : entrée non inverseuse ;
* broche 4 notée VP- : reliée à la borne - de l’alimentation (en général - 15 V) ;
* broche 6 notée S : borne de sortie de l’A.O. ;
* broche 7 notée VP+ : reliée à la borne + de l’alimentation (en général + 15 V).
schéma réel
schéma symbolique
–
+
+
2
+
1
3
4
7
8
6
5
VP-
VP+
S
E -
E +
UE-M
UE+M
M
USM
fig. 1
UE-M
UE+M
Remarques :
* La masse n’est reliée à aucune broche de l'A.O. (voir schéma réel) ;
* Toute manipulation doit commencer par l’alimentation de l’A.O. ;
* La différence entre les tensions UE+M et UE-M est appelée tension différentielle d’entrée et est notée Vd ou
.
Exprimer en fonction de UE+M et UE-M ..........................................................................
Représenter cette tension sur le schéma symbolique.
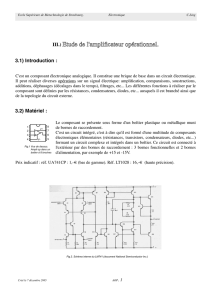
2. Modèle équivalent d'un A.O. (fig. 2)
Cas de l’AO idéal (ou parfait)
* Re est infinie, d’où : .............................
* Rs = 0 d’où : .........................................................
* L’amplification différentielle en tension définie
par Ad = Us / est infinie.
Re
Rs
E -
E +
Ad*
us
fig. 2
i

MPI - Quadripôles actifs utilisant un amplificateur opérationnel en régime linéaire page 2 / 5
Cas de l’AO réel (TL 081)
Il est caractérisé par :
* Re = 10 M ; Rs 10 ; Ad = 105 ;
* L’intensité is du courant de sortie ne dépasse pas 30 à 40 mA ;
* On aura toujours : - Vsat us Vsat (Vsat est appelée tension de saturation ; sa valeur est toujours inférieure
à VP+).
3. Régime de fonctionnement d’un A.O.
3.1 Régime linéaire
Condition nécessaire (mais non suffisante) : il peut être obtenu avec des montages comprenant une liaison
entre la sortie S et l’entrée inverseuse E -. Alors : = ...…… tant que -Vsat < us < Vsat.
3.2 Régime non linéaire (ou saturé)
Il est obtenu avec des montages ne comprenant pas de liaison entre S et E - ou comprenant une liaison
entre S et l'entrée non inverseuse E +. On a alors : ...... 0 .
us est de même signe que si > 0 alors us = ............... ; si < 0 alors us = ...............
II - MONTAGES UTILISANT L'A.O. EN REGIME LINEAIRE
1. Montage amplificateur inverseur
1.1 Montage (fig. 3)
L'A.O. est un TL 081 polarisé en +15 V / -15 V.
On donne R1 = 10 k ; R2 = 27 k puis 47 k.
0
0
u
e
u
s
R
1
R
2
fig. 3
A
1.2 Etude théorique (exercice à faire à la maison)
* Représenter, sur le schéma du montage (fig. 3), les
courants i1 et i2 traversant R1 et R2, les courants dans
les entrées (i+ et i–), les tensions aux bornes des
résistors.
* Appliquer la loi des mailles en entrée.
* Appliquer la loi des nœuds en A.
* Appliquer la loi des mailles en sortie.
* Etablir l’expression de us en fonction de ue.
* Exprimer l’amplification en tension Av = us / ue en
fonction de R1 et de R2.
* Calculer Av.
Conclusion : Quelle est la fonction réalisée par ce montage ?
1.3 Etude expérimentale en régime continu
ue est ici une tension continue et réglable (Ue).
Faire varier Ue, relever les valeurs de Ue et de Us correspondantes dans Regressi sous Windows utilisé en
tableur. Le commentaire sera : « ‘Montage amplificateur inverseur avec R1 = 10 k ; R2 = 27 k (page 1)
puis 47 k (page 2) ».
Les valeurs données ci-dessous pour Ue sont indicatives. Les valeurs (de Ue et de Us) entrées au clavier
seront celles lues sur les multimètres. Chaque cas figurera sur une page.

MPI - Quadripôles actifs utilisant un amplificateur opérationnel en régime linéaire page 3 / 5
1ère page : R2 = 27 k (titre : « R1= 10 k ; R2 = 27 k »)
Ue (V)
- 8
-7
-5
-4
-3
-2,5
-2
-1,5
-1
-0,5
0
0,5
1
1,5
2
2,5
3
4
5
7
8
2ième page : R2 = 47 k (titre : « R1= 10 k ; R2 = 47 k »)
Ue (V)
- 8
-7
-5
-4
-3
-2,5
-2
-1,5
-1
-0,5
0
0,5
1
1,5
2
2,5
3
4
5
7
8
Superposer les caractéristiques de transfert Us = f(Ue) puis imprimer le graphe après avoir indiqué vos noms
et légendé les deux caractéristiques. Faire apparaître les domaines de fonctionnement linéaire et saturé.
Enregistrer le fichier sous le nom inverse.rw3 dans Gn \ Physique \ quadripo \ Aop \ Aop_lin \ .
Déterminer ensuite le modèle mathématique de chaque caractéristique dans le domaine de fonctionnement
linéaire :
* 1er cas : ...............................................................................................…............ Ecart : ......................
* 2ième cas : ........................................................................................................... Ecart : .......................
Application : en utilisant la caractéristique tracée pour R2 = 27 k compléter le tableau suivant :
Ue (V)
-3,5
4,5
6,5
Us (V)
Régime de fonctionnement
1.4 Etude expérimentale en régime variable à l’aide de l’oscilloscope
ue est ici une tension triangulaire, symétrique, sans offset, délivrée par un GDS et caractérisée par :
f = 200 1 Hz ; Ûe = 1,5 V (1ère cas) puis 4,0 V (2ième cas) ;
R1 = 10 k et R2 = 47 k.
Reprendre le schéma de la figure 3 en représentant le GDS et les branchements de l’oscilloscope de façon à
obtenir sur la voie A la tension ue et sur la voie B la tension us .
Faire le montage et relever ci-dessous les deux oscillogrammes de ue et de us.
Premier cas : Ûe = 1,5 V
Vitesse de balayage kb : ....................... /div XY (X = voie ..................)
DC AC
Sensibilités kv1 : ............................... /div (tension : )
kv2 : .............................. /div (tension : )
Deuxième cas : Ûe = 4 V
Vitesse de balayage kb : ....................... /div XY (X = voie ..................)
DC AC
Sensibilités kv1 : ............................... /div (tension : )
kv2 : .............................. /div (tension : )
Dans le premier cas, comparer les valeurs théorique et expérimentale de l’amplification en tension.
Dans la 2ième cas, évaluer la valeur minimale de ue entraînant la saturation basse ( - Vsat)

MPI - Quadripôles actifs utilisant un amplificateur opérationnel en régime linéaire page 4 / 5
2. Montage suiveur de tension
2.1 Etude théorique (fig. 4)
Exprimer l’amplification en tension AV = us / ue :
–
+
+
+
us
ue
fig. 4
2.2 Utilité du montage suiveur de tension
* Réaliser le diviseur de tension suivant (fig. 5.1) :
Uso
U
U = 10 V ; R1 = R2 = 10 k
R1
R2
fig. 5.1
Usc
U
U = 10 V ; R1 = R2 = 10 k;Rc = 1 k
R1
R2
Rc
fig. 5.2
* Prévoir théoriquement la tension Usoth :
* Contrôler expérimentalement la valeur obtenue pour Uso : Usoex = ..................
* Charger le diviseur de tension par Rc = 1 k (fig. 5.2). Mesurer alors Usc = ............................
* Comparer Usc et Usoex : ………………………………………………………………
La résistance de charge Rc a une influence importante sur la tension de sortie du diviseur de
tension.
* Inclure entre le diviseur de tension et la charge un montage suiveur de tension (fig. 5.3).
–
+
+
+
Usc
U
U = 10 V ; R1 = R2 = 10 k;Rc = 1 k
R1
R2
Rc
Usc
fig. 5.3
* Mesurer la tension aux bornes de la charge Usc = ........................
Conclusion : le montage suiveur a permis d’isoler le diviseur de tension de la charge.
L’emploi du suiveur de tension est limitée : en effet, un A.O. ne peut pas débiter un courant supérieur à Is max.

MPI - Quadripôles actifs utilisant un amplificateur opérationnel en régime linéaire page 5 / 5
3. Montage amplificateur de différence
3.1 Montage (fig.6)
–
+
+
+
us
ue1
ue2
R1
R3
R1 = R2 = R3 = R4 = 10 k
R2
R4
fig. 6
3.2 Etude expérimentale en régime continu
Réaliser le montage et compléter le tableau ci-dessous (les valeurs indiquées sont approximatives) :
Ue1 (V)
10
10
10
- 10
- 10
Ue2 (V)
8
- 8
6
6
- 6
Us (V)
Régime de fonctionnement
(L = linéaire ; S = saturé)
Dans le cas particulier où R1 = R2 = R3 = R4 , quel autre nom peut-on donner à ce montage ?
3.3 Généralisation au cas où R1 = R3 et R2 = R4 (avec R2 > R1)
On démontre la relation
)( 12
1
2ees uu
R
R
u
Justifier l’appellation « amplificateur de différence » donnée à ce montage :
Ce montage sera utilisé dans différents TP et, en particulier, dans le TP « Etude d'un capteur de
température ».
1
/
5
100%





![III - 1 - Structure de [2-NH2-5-Cl-C5H3NH]H2PO4](http://s1.studylibfr.com/store/data/001350928_1-6336ead36171de9b56ffcacd7d3acd1d-300x300.png)