Les classes de processeurs

Auto apprentissage – LE DSP – Equipe Killer Team
1
Equipe 11

Auto apprentissage – LE DSP – Equipe Killer Team
2
Sommaire
Introduction
I. Qu’est ce qu’un DSP :
1) DSP le coeur d'un système de traitement numérique du signal
2) Avantages d’un DSP
3) Structure interne
II. Différences entre un microprocesseur et un DSP :
1) Opérateur MAC
2) Accès mémoire
III. Architecture de Von Neuman et de Harvard :
1) Von Neuman
2) Harvard
3) Utilisation de ces structures dans le DSP
4) Architecture de Harvard modifiée :
IV. Types et formats de données manipulés par les DSP :
1) Les DSP à virgule flottante
2) Les DSP à virgule fixe
V. Performances des DSP
1) Mesure de calcul pur
2) Mesure de temps d exécution (« benchmark »)
VI. Mesures et outils de développement :
1) Définition des ressources nécessaires
2) Sélection du DSP le plus adapté
VII. Structure DSP
1) Structure matérielle de développement
2) Le simulateur
3) Le module d’évaluation
4) L’émulateur temps réel
5) Bilan
VII. Les DSP aujourd’hui
1) Les DSP parmi différents types de processeurs
2) Algorithmes et applications typiques
3) Quelques DSP actuels
4) La R&D industrielle autour des DSP en France
Conclusion

Auto apprentissage – LE DSP – Equipe Killer Team
3
Introduction
Depuis maintenant plusieurs années, le traitement numérique du signal est une technique en plein
essor. Cette technique s’appuie sur plusieurs disciplines, citons simplement les principales :
l’électronique analogique et numérique (préparations, conditionnements des signaux,
CAN, CNA ),
les microprocesseurs (classiques ou dédiés au traitement du signal),
l’informatique (algorithmes, systèmes de développements, exploitations),
les mathématiques du signal (traitements du signal).
Parmi ces disciplines, nous allons nous intéresser plus précisément aux processeurs de traitements
des signaux, plus communément désignés par l’acronyme Anglais DSP (Digital Signal
Processor).
Les domaines d’applications du traitement numérique du signal sont nombreux et variés
(traitements du son, de l’image, synthèse et reconnaissance vocale, analyse, compression de
données, télécommunications, automatisme, etc.) Chacun de ces domaines nécessite un système
de traitement numérique, dont le cœur est un (parfois plusieurs) DSP ayant une puissance de
traitement adaptée, pour un coût économique approprié.
Les microprocesseurs sont en perpétuelle évolution, chaque nouvelle génération est plus
performante que l’ancienne, pour un coût moindre. Les DSP, qui sont un type particulier de
microprocesseur, n’échappent pas à cette évolution.
Pour y parvenir, nous traiterons d’un point de vue général les différentes architectures et les
performances des DSP, nous aborderons les outils de développements, et nous approfondirons le
sujet par l’étude d’un cas.

Auto apprentissage – LE DSP – Equipe Killer Team
4
I. Qu'est ce qu’un DSP
1) DSP le coeur d'un système de traitement numérique
du signal
DSP : Digital System Processing (Traitement Numérique du Signal)
Un DSP est un type particulier de microprocesseur. Il se caractérise par le fait qu’il intègre un
ensemble de fonctions spéciales. Ces fonctions sont destinées à le rendre particulièrement
performant dans le domaine du traitement numérique du signal.
Comme un microprocesseur classique, un DSP est mis en œuvre en lui associant de la mémoire
(RAM, ROM) et des périphériques. Un DSP typique a plutôt vocation à servir dans des systèmes
de traitements autonomes. Il se présente donc généralement sous la forme d’un microcontrôleur
intégrant, selon les marques et les gammes des constructeurs, de la mémoire, des timers, des ports
série synchrones rapides, des contrôleurs DMA, des ports d’E/S divers.
Schéma général externe
Nous allons définir ici le schéma général d'utilisation d'un DSP qui permet de développer la
plupart des applications simples en traitement du signal.
Les circuits exploitant les processeurs de traitement du signal ont une architecture particulière
décomposable en deux parties :
- Une chaîne d'acquisition
- Une unité de traitement du signal (DSP)
- La chaîne d'acquisition
Le signal en entrée du circuit peut être :
- un signal électrique
- une grandeur physique par le biais d'un capteur
- un signal numérique
Puis en fonction du signal d'entrée plusieurs éléments peuvent constituer la chaîne d'acquisition.

Auto apprentissage – LE DSP – Equipe Killer Team
5
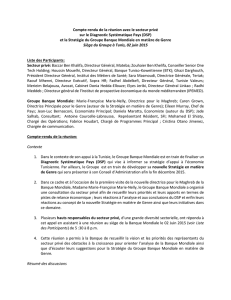
Schéma général :
Filtre
Passe - Bas
DSP
Mémoire
Entrées/Sorties
Convertisseur
Numérique
Analogique
Filtre
Passe - Bas
Signal
original
Signal traité
Convertisseur
Analogique
Numérique
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
1
/
37
100%