Télécharger

Robotique en chirurgie

Sommaire
Introduction
Robotique en chirurgie
Chirurgie
Spécialités chirurgicaux
Robotique en chirurgie général
Exemples
Applications
Etats de l’art

Introduction
La première génération de robots chirurgicaux est déjà en cours
d'installation dans un certain nombre de salles d'opération à travers le
monde. Robotiques est mis en place à la médecine car elle permet un
contrôle sans précédent et la précision des instruments chirurgicaux dans
des procédures minimalement invasives. Jusqu'à présent, les robots ont
été utilisés pour positionner un endoscope, effectuer une intervention
chirurgicale de la vésicule biliaire et le reflux gastro-œsophagien correct
et brûlures d’estomac. Le but ultime du champ de la chirurgie robotique
est de concevoir un robot qui peut être utilisé pour effectuer à thorax
fermé, la chirurgie à cœur battant. L'utilisation de la robotique en
chirurgie augmentera au cours des prochaines décennies sans aucun
doute. La chirurgie mini-invasive (MIS) est une approche révolutionnaire
de la chirurgie. En MIS, l'opération est effectuée avec des instruments et
des équipements de visualisation inséré dans le corps par de petites
incisions créées par le chirurgien, contrairement à la chirurgie ouverte
avec de grandes incisions. Cela minimise le traumatisme chirurgical et les
dommages aux tissus sains, ce qui entraîne des temps de récupération
plus courte des patients
Jusqu'où robot peut aider la médecine, la chirurgie
particulièrement ? D’apporter une réponse, un aperçu de l'État de
l’art, de présenter de nouvelles idées sur les types de robots médicaux, les
résultats originaux et des expériences pratiques dans ce sujet
d’expansion, des robots chirurgicaux existants, nous avons préparé ce
travail dans Ces quelques pages

La robotique en chirurgie

La Chirurgie a connu une évolution au cours des dernières décennies vers
minimalement approches invasives des procédures qui ont été
classiquement réalisées si grande ouverte incisions. La première
hypothèse dans le monde de la chirurgie qu’ '«une grande opération
nécessite une grande incision "n'est plus vrai. Le bénéfice des réductions
significatives de la taille des incisions est clair pour les chirurgiens qui
apprécient moins de complications de la plaie et à la formation du public
qui apprécient moins de douleur post-opératoire et un retour rapide aux
activités normales. Comme incisions et les ports d'accès deviennent plus
petits et moins nombreux, les outils nécessaires pour les tâches de
ensable complexe à travers ces ports sont en cours d’élaboration. La
robotique est un des principaux outils sont intégrés dans
l'environnement chirurgical.
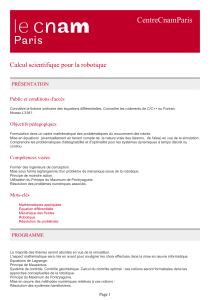
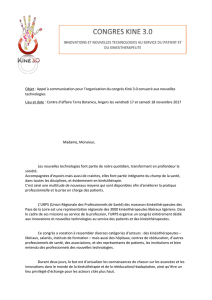
Robotique en chirurgie général
Patient side cart. ©[2007] Intuitive Surgical, Inc
Les Robots chirurgicaux
offrent de nombreux
avantages dans le domaine de
la chirurgie mini-invasive
général et ont apporté une
contribution significative dans
le domaine au cours des vingt
dernières années. Robotiques
a été introduit à la salle
d'opération de chirurgie
générale sous la forme de
chirurgien contrôlé bras
robotisés pour la manipulation
de la caméra laparoscopie.
Plus récemment, les systèmes de robotique chirurgicale qui permettent
 6
7
8
9
10
11
12
13
14
6
7
8
9
10
11
12
13
14
1
/
14
100%