MOTEUR A COURANT CONTINU

FCMN 26 avril 2005
PhG-MCC
Une machine à courant continu est un convertisseur d'énergie réversible. Elle peut fonctionner en moteur ou
en génératrice.
La production d'énergie utile souhaitée s'accompagne de la production d'autres formes d'énergies nommées
pertes (d'énergies).
Deux représentations des machines à courant continu sont d'usage.
Le symbole est la lettre M pour le moteur, remplacé
par la lettre G pour la génératrice.
Les machines à courant continu peuvent avoir des caractéristiques physiques selon le mode d'alimentation
(d'excitation) des bobines du stator (série, shunt (dérivation), compound ou excitation indépendante).
Nous n'étudierons que le moteur à excitation indépendante ou séparée.
I- Fonctionnement
1- Étude expérimentale
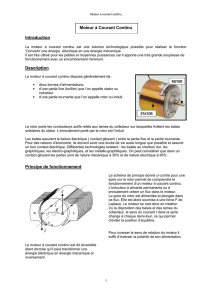
On considère le dispositif expérimental ci-dessous.
Il comprend :
- deux bobines (2) et (7)
montées en série ;
- un rotor bobiné (4) ;
- un collecteur (5) et des
balais (6) ;
- des noyaux ferromagnétiques
(1) et (3).
Le rotor alimenté en courant continu est placé dans le champ
produit par les deux bobines. Le rotor est
entraîné en rotation sous l'effet des forces électromagnétiques (de
Laplace).
2- Principe de fonctionnement
M
___
M
___
Circuit d'induit
Circuit inducteur
1 2 3 4 5 6 7
spire d'induit
collecteur
NORD SUD
1
2
I

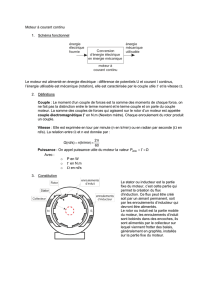
L'induit est placé dans le champ magnétique créé par l'inducteur.
Une spire située dans le champ magnétique
B
est soumise aux forces de Laplace1 et
2.
Ce couple de forces provoque la rotation du rotor.
Remarque : Une spire est constituée de deux
conducteurs droits longitudinaux et de fils de liaison
transversaux.
Placé dans un champ magnétique
B
, un conducteur de longueur l parcouru par un courant d'intensité
I est soumis à une force
F
d'intensité : F = B I l sin avec = (
B
,
l
)
Le travail W de la force de Laplace pour un déplacement d du conducteur est : W = F d
Cas particulier : si =
Error!
alors sin = 1, on obtient W = B I l d d'où W = B I S.
avec = B S on obtient W = I
3 - Rôle du collecteur
La machine à courant continu est constituée de plusieurs
conducteurs droits.
Il est nécessaire d'adapter le sens du courant dans les
conducteurs pour que son effet sur la rotation du rotor soit
toujours dans le même sens : c'est le rôle du collecteur.
La force électromagnétique doit changer de sens lorsqu'un
conducteur traverse la ligne neutre (x,y).
Exercice: Tracer les vecteurs représentants les forces appliquées aux conducteurs droits.
4- Inversion du sens de rotation
Pour changer le sens de rotation d'un moteur à excitation indépendante, on inverse le sens du courant,
soit dans l'induit, soit dans l'inducteur.
II- Constitution
x
y

FCMN 26 avril 2005
PhG-MCC
Le moteur comporte 3 organes essentiels :
- le stator (1) porte le circuit inducteur constitué de bobines (3) parcourues par des courants. II assure la
création et la canalisation du champ magnétique.
- le rotor (4) porte l'induit où se crée la force électromagnétique. Il est constitué de conducteurs droits
noyés dans des encoches (5). L'induit est baigné par le champ magnétique créé par l'inducteur.
- le collecteur (6) assure l'alimentation des conducteurs de l'induit et la commutation, le changement de
polarité, nécessaire à la rotation du rotor.
Légende
1 Stator (inducteur)
2 Noyau polaire (inducteur)
3 Bobinage (inducteur)
4 Rotor (induit)
5 Encoche (induit)
6 Collecteur
7 Balai
8 Entrefer
Remarque 1 : Les moteurs à inducteur bobiné, qui tourne dans les deux sens, sont munis de
pôles auxiliaires pour éviter les phénomènes de commutation.
Remarque2 : Pour des moteurs de quelques watts, le circuit inducteur est remplacé par un
aimant permanent en matériau ferromagnétique.
III- Equations des moteurs à courant continu
1- Force contre-électromotrice
La force contre-électromotrice (f.c.é.m) E' dans le circuit d'induit, porté par le rotor, a pour
expression : E' = n N (1) avec N: nombre de conducteurs
actifs ;
n : fréquence de rotation ;
: flux produit sous un pôle inducteur en webers (Wb).
Remarque : l'expression complète de la f.c.é.m est E' =
Error!
N n
avec p : nombre de paires de pôles de la machine
a : nombre de paires de voies d'enroulement (partie du bobinage comprise
entre deux balais)

- pour un moteur tétrapolaire à 4 balais : 4 pôles d'ou p = 2 et,
soit 4 voies d'enroulement, a = 2, soit 2 voies d'enroulement, a = 1
2- Fréquence de rotation
De la formule précédente, on tire : n =
E'
N
Si l'on désigne par R la résistance (trés faible) de l'induit qui est le siège de la f.c.é.m, pour une tension
d'induit U et un courant I qui le traverse, la loi d'Ohm donne :
E ' = U – RI (2)
d'où
n =
Error!
(3)
La fréquence de rotation, pour un moteur donné, dépend de U, de I et de .
Pour un courant d'excitation i donné, le flux est par conséquent fixé, la fréquence de rotation est une
fonction affine de l'intensité du courant dans l'induit I. n = –
Error!
I +
Error!
Sécurité : Si s'annule (absence d'excitation des inducteurs) la fréquence de rotation tend vers l'infini
d'où un risque d'embalement dangereux.
Un relais placé dans le circuit inducteur assure une protection à minimum de courant.
3- Démarrage
Au moment du démarrage, la fréquence de rotation est nulle.
L'expression de l'intensité du courant déduite de (3) est I =
Error!
d'où Id =
Error!
.
L'intensité Id absorbée par l'induit de trés faible résistance R (quelques centièmes d'ohm) risque de
prendre des valeurs destructrices pour le moteur.
En conséquence, le moteur doit démarrer progressivement à l'aide d'un système électronique contrôlant
l'intensité du courant pendant l'accélération ou grâce à des résitors de démarrage Rd progressivement
éliminés (démarrage par élimination de résistances automatique ou manuel).
Calcul du courant
de démarrage
Id =
Error!
Remarque :
M
___
+-
Rd
R I
E'
I
E'
R
U
UM
I
équivaut
à
(induit seulement)

FCMN 26 avril 2005
PhG-MCC
Une protection à minimum de tension doit interdire la remise en marche après un manque de
tension intempestif (il faut recommencer une procédure de démarrage).
IV- Bilan des puissances
Un moteur est un convertisseur d'énergie. Cette conversion produit des formes d'énergie inutiles que l'on
nomme pertes d'énergies. Un moteur est conçu pour absorber de la puissance électrique et pour fournir de
la puissance mécanique.
Le bilan des puissances pour un moteur continu à excitation indépendante est le suivant :
1- Puissance électrique absorbée Pa
- par l'induit : UI
- par l'inducteur : ui
Pa = UI + ui
2- Pertes par effet Joule pj
- dans l'induit : RI²
- dans l'inducteur : ri² = ui
pj = RI² + ri²
3- Puissance électrique utile Peu
La puissance électrique utile est la puissance utile du point de vue électrique.
Peu = Pa – Pj
Peu = (UI + ui) – (RI² – ri²) = UI – RI² d'où Peu = (U – RI) I
avec E' = U – RI
Peu = E'I
4- Pertes constantes pc
Les pertes constantes sont dues aux frottements pméca et aux pertes magnétiques pfer.
Elles ne dépendent que très peu du régime de fonctionnement d'ou l'expression pertes constantes.
pc = pméca+ pfer
5- Puissance mécanique utile Pu
La puissance mécanique utile est la puissance disponible sur l'arbre du moteur.
Elle correspond à la différence de la puissance électrique utile et des pertes constantes.
Pu = Peu – pc
Du point de vue mécanique, la puissance mécanique utile peut être exprimée en fonction de la
fréquence de rotation (en tr.s – 1 ) et du moment du couple moteur (en N.m).
Pu = 2n.M
6- Rendement
Le rendement d'une machine est le rapport de ce qui est disponible en sortie, içi la puissance
mécanique utile par ce qui est absorbé en entrée içi la puissance électrique absorbée.
Pa
UI Pu
MOTEUR
ui
Peu
ui = ri2RI2pc
 6
7
6
7
1
/
7
100%