Démarreurs électroniques pour moteurs électriques industriels

Démarreurs électroniques pour moteurs électriques
industriels.
1. Fonction :
Permettre le démarrage et éventuellement la variation de vitesse des moteurs électriques tout
en protégeant les moteurs contre toutes surintensités et emballements.
2. Types de démarreurs :
Deux grandes familles existent :
Moteurs
Types
Permet
Pour moteurs à courant
continus.
En France Le plus connu est
le « RECTIVAR » de
Télémécanique
Démarrage et variation de
vitesse, il est possible d’asservir
celle-ci.
Pour moteurs à courant
alternatifs.
Démarreur
Démarrage seul
« ALTIVAR » de
Télémécanique
Variation de vitesse, il n’est pas
possible d’asservir celle-ci.
« GRADIVAR » de
Télémécanique
Démarrage et variation de
vitesse, il n’est pas possible
d’asservir celle-ci.
A courant magnétisant et
rotoriques
Démarrage et variation de
vitesse. Il est possible d’asservir
vitesse et position
Pour Moteurs synchrones
Démarrage et variation de
vitesse. Il est possible d’asservir
vitesse et position
3. Types d’actions sur le courant.
Le courant d’alimentation des moteurs arrive en « tout ou rien », Il est modulé par des composants
électroniques de puissance, soit des Thyristors (RECTIVAR), soit des triacs (GRADIVAR), soit
enfin des transistors CMOS de puissance (pour l’ ALTIVAR). Ces composants sont prévus pour se
fermer ou s’ouvrir dans des temps inférieurs à la micro seconde et se comportent comme des
interrupteurs.
De ce fait la puissance perdue dans le démarreur est minime et le rendement excellent, par
contre, il y a risque de génération de parasites sur le secteur si les démarreurs ne sont pas bien
antiparasités.

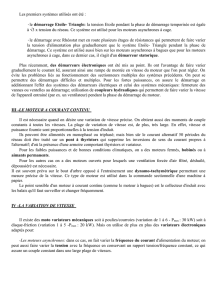
4. Démarreurs pour moteurs à courant continu.
Généralement, Ce type de démarreur est alimenté en alternatif mono ou triphasé, 50Hz, par
commodité. Cela sous-entend qu’il y a un redressement bi alternance pour obtenir du courant
continu.
4.1 Schéma fonctionnel :
Remarque : une génératrice couplée à l’arbre du moteur assure la fourniture de l’information
vitesse du moteur en effectuent une conversion vitesse-tension.
4.2 Principe :
- Tout moteur à courant continu est régie par la loi de récepteurs
U = E’ + R . I
( R = résistance de l’induit.)
- La fcem E’ dépend de la vitesse n, du nombre de brins actifs sur l’induit N et du flux magnétique
produit par les inducteurs
E’ = n . N .
- U = n . N . + R . I , R est très petite, donc, si elle est négligée,
U n . N .
Il sera donc possible de faire varier la vitesse (n) de deux manières, en agissant sur la tension
d’alimentation ou sur le flux. ( Le nombre de brins est impossible à modifier )

Deux constats :
- n varie linéairement avec U alimentation.
- n présente une asymptote et tend vers l’infini si le flux tend vers zéro. Cette situation est très
dangereuse, on dit que le moteur s’emballe. Il peut se détruire.
La solution qui a été retenue :
a) Fixer une alimentation aux inducteurs qui produisent le flux magnétique ainsi que de tester en
permanence leur état. Mettre hors énergie, s’il y a problème.
b ) Modifier la tension d’alimentation de l’induit.
c ) Permettre un asservissement de cette tension d’alimentation en fonction de la vitesse réelle de
l’arbre moteur et de l’intensité consommée par l’induit.
4.3 Asservissement de la vitesse :
Le principe utilise un comparateur de tensions qui fournit une ddp fonction de la différence des
tensions comparées.
a) Si U consigne > U retour alors U’ important et > 0, donc le moteur accélère.
b) Si U consigne < U retour, alors le moteur est arrivé et dépassé la vitesse voulue,
donc U’ < 0 et le moteur est obligé de ralentir.

c) Si U consigne = U retour, alors U’ tend vers zéro, le moteur est obligé de ralentir
et l’on revient à la situation a)
Remarques :
- Lorsque le moteur est lancé et doit ralentir, il se comporte alors en génératrice fournit de
l’énergie. Certains démarreurs récupèrent cette énergie.
- Pour éviter des contraintes trop importantes dues à des variations trop rapides de la
consigne, l’apparition de celle-ci, est retardée avec une cellule « RC », interne au variateur.
- Pour simplifier la structure interne du démarreur, les constructeurs n’ont pas voulu que le
démarreur puisse faire tourner le moteur dans les deux sens. Cela est cependant possible en
rajoutant un couple de contacteurs qui assurent la permutation de l’alimentation de
l’induit. Des modèles ( plus chers ) dispense de ce tracas.
4.4 Limitation de l’intensité.
En série avec l’alimentation de l’induit , les constructeurs ont placé un « schunt » pour mesurer
l’intensité absorbé .
Cela est nécessaire :
- Lors du démarrage du moteur E’ est faible donc I risque d’être trop importante .
[ I = (U – E’ ) / R ]
- Lors de l’asservissement, si U consigne< U retour.
Une structure, elle aussi à comparateur, assure La limitation en fonction d’une consigné fixée
lors du montage de l’installation.
4.5 Interface de puissance :
Elle est généralement constituée d’un pont de thyristors monté en pont de diodes « Graetz ».

La commande agit par modification de l’angle de fermeture permet de faire varier la puissance de 0 à
Pmaxi.
La courbe rouge est la tension qui apparaît au bornes de l’induit, les bobines de celui-ci assure
une forme de filtrage. En réalité la forme est beaucoup plus «bruitée ».
4.6 Conseils de documentation :
Sur le « mémotech électrotechnique » collection A. Capliez, page261
4.7 Quelques documents :
a ) Cadrans de fonctionnement :
b ) Synoptique complet d’un démarreur de moteurs à courant continu.
c) Quelques modèles :
d ) Schémas de câblage de variateurs :
 6
7
8
9
10
11
12
13
14
6
7
8
9
10
11
12
13
14
1
/
14
100%