autofocus de projecteur de diapositive

DM2 asservissement
1 / 4
AUTOFOCUS DE PROJECTEUR DE DIAPOSITIVE
Principe de fonctionnement
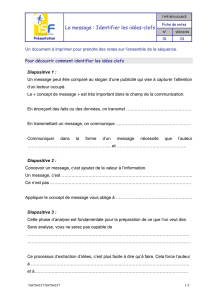
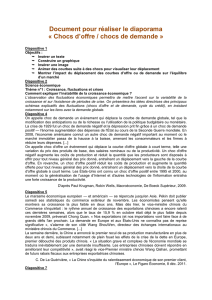
Une première diapositive (4) est positionnée par le système de
chargement automatique. On règle manuellement l'objectif (5) pour obtenir
une image nette sur l'écran. Le but de l'autofocus est de maintenir
automatiquement la netteté de l'image au cours des différentes vues malgré
un positionnement plus ou moins exact des diapositives.
La lampe auxiliaire (3) éclaire la diapositive sous un angle . La
surface de la diapositive joue le rôle de miroir et renvoie une tache
lumineuse circulaire (en hachuré sur la vue de dessus de la cellule double)
Si cette tache est centrée, les deux demi-cellules photoélectriques délivrent
la même tension et la tension différentielle V est nulle. Si la diapositive
vient à s'écarter de la position initiale (déplacement x), la tache lumineuse se
déplace de y et une moitié de cellule reçoit plus de lumière que l'autre : une
tension différentielle est alors créée. Cette tension est utilisée pour la
commande du moto-réducteur (8). Celui-ci, par l'intermédiaire de la vis (7)
déplace l'objectif pour maintenir la netteté. En fait c'est la distance
diapositive - objectif qui est maintenue constante, la cellule étant solidaire
de l'objectif.
La lampe auxiliaire délivre un faisceau lumineux de 2 mm de diamètre.
Les demi-cellules délivrent une tension proportionnelle à la surface éclairée et elles sont montées en
opposition.
y
4
3
6
x
Foyer lumineux 1
Condenseur 2
Diapositive 4
Objectif
Motoréducteur 8
Cellules photoélectriques 6
Vis
Chariot
vers écran
Foyer auxiliaire 3

DM2 asservissement
2 / 4
1. Etude du capteur de position
1.1. Donner l'expression du déplacement y de la tache lumineuse en fonction du déplacement x de la diapositive et de l' angle .
y = f(x,)
Calculer la valeur à donner à l'angle pour obtenir y = 1,5 x
1.2. Quand la tache lumineuse est entièrement sur une demi-cellule, la tension différentielle
est alors de 3V. Calculer l'expression de cette tension différentielle en fonction du
déplacement y de la tache lumineuse. V = f(y)
1.3. Tracer V = f(y) pour -1,5 < y < 1,5 ( V en volts et y en mm)
1.4. Calculer le domaine de linéarité à 5 % de V = f(y) (domaine où l'erreur relative entre
f(y)
et la tangente à l' origine de f(y) est inférieure ou égale à 5 %).
1.5. Montrer alors que la fonction de transfert du capteur peut se mettre sous la forme d'un gain pur Kc. Calculer Kc.
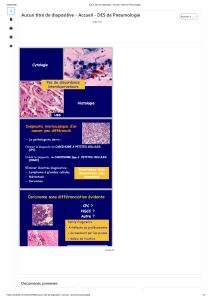
2. Etude du moteur.
2.1. A partir des équations mécaniques et électriques du moteur à courant continu à flux constant, reproduire et compléter le
schéma-bloc (voir annexe).
?
?
Kt
-
+
Cm
i
U
Ke
2.2. Exprimer la fonction de transfert du moteur
H p p
U p
1( )
( )
.
2.3. A partir des valeurs numériques données en annexe, montrer que Kt ≈ Ke = K (Kt en Nm/A et Ke en V/rd.s-l).
2.4. En vérifiant numériquement que
d
LKRJ
, pour le moteur employé, montrer que l'on peut mettre Hl(P) sous la forme :
H p C
p p
eem
11 1
2.5. Calculer numériquement C, e, em.
L’'inertie du groupe de lentilles de l'objectif (5) rapportée à l'axe du moteur est négligeable devant le moment d'inertie du rotor
du moteur.
2.6. En déduire la fonction de transfert numérique H2(p) du système ayant pour entrée la tension du moteur et pour sortie le
déplacement d de l'objectif (H2(p) en m/V) :
H p d p
U p
2( )
( )
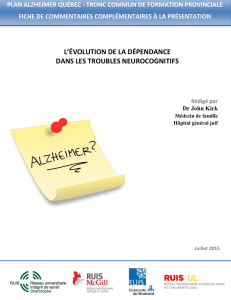
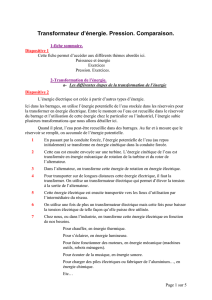
3. Régulation de position.
Pour réaliser la régulation de position de l'objectif, on réalise le montage suivant :
diapositive
cellules
objectif
Motoréducteur
et vis-écrou
Amplificateur
Correcteur
-
+
V
d
U
6a
6b
V
y
Kc
V en volts
x en mètres

DM2 asservissement
3 / 4
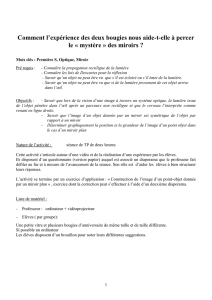
3.1. Mettre le système sous la forme du schéma-bloc suivant en explicitant H3(P) : A(p) est la fonction de transfert de
l'amplificateur correcteur, pert représente la perturbation (mauvais positionnement de la diapositive).
H3(p)
A(p)
-
+
d
pert
x
Réglage
initial
+
+
3.2. On considère le réglage initial comme position de référence (0). Peut-on négliger le pôle électrique du moteur et prendre le
modèle simplifié ci-dessous pour étudier le comportement dynamique du système ?
H4(p)
A
-
d
pert
x
+
3.3. Le bloc A est un gain unitaire de valeur Al = 1 et on utilise le modèle simplifié ci-dessus, avec :
H p p p
412
1 0 05
( ) ,,
Tracer le diagramme de Bode en boucle ouverte de ce système.
3.4. On règle le gain A à la valeur A3 = 25 (28 dB).
3.4.1. Donner l'expression de la fonction de transfert en boucle fermée :
H p d p
pert p
BF5( ) ( )
( )
3.4.2. Mettre cette fonction de transfert sous forme canonique et en déduire m et :
H p m p p
BF52 2
1
1 2
( )
3.5. On règle l'objectif, pour obtenir une image nette sur l'écran, à l'aide de la première diapositive. La deuxième diapositive se
positionne avec un écart de 0,1 mm.
3.5.1. Sur quelle distance va se déplacer l'objectif?
3.5.2. Tracer l’évolution du déplacement de l'objectif en fonction du temps (d = f(t))
3.5.3. En déduire le dépassement et le temps de réponse à 95 %.
4. Etude du courant
Sous peine de détruire le bobinage du moteur, le courant impulsionnel qui le traverse ne doit pas dépasser 7 A. On se
propose de calculer le courant Imax lors de l'évolution décrite à la question 3.5.
4.1. Donner l'expression littérale de la fonction de transfert :
H p p
Um p
6( ) Im( )
( )
courant moteur
tension moteur
issu du modèle du
moteur obtenu à la question 2.1.
4.2. On néglige le frottement visqueux et la constante de temps électrique e devant la constante de temps électromécanique em
et on suppose Kt = Ke. Exprimer littéralement la nouvelle fonction de transfert :
H p p
Um p
7( ) Im( )
( )
.
4.3. A partir de H7(p), calculer numériquement la fonction de transfert H8(p) (on garde le gain A3 = 25) :
H p p
pert p
8( ) Im( )
( )
.
4.4. En déduire le courant de démarrage pour l'évolution décrite à la question 3.5 (pert = O,1 mm) Confirmer le résultat par
l'analyse physique. Risque-t-on de griller le moteur ?

DM2 asservissement
4 / 4
Annexe
Le moto-réducteur est constitué d'un moteur RTC type MK 72 320 et d'un réducteur à engrenages RTC type MRA 72.
Moteur RTC type MK 72 320
Tension nominale
5,25 V
Vitesse à vide
3 000 tr/mn
Couple nominal
1 m.Nm
Courant nominal
60 mA
Résistance d'induit : R
16
Inductance d'induit : L
16 mH
Moment d'inertie du rotor : J
9 g.cm2
Couple de frottement visqueux Kd
2,8.10-6 Nm/rd.s-1
Réducteur RTC type MRA 72
Charge maximale admissible
30 m.N
Force axiale maximale
2 N
Force radiale maximale
4,5 N
Rapport de réduction :
25,85 / 1
Vis sans fin
Nombre de filets
1
Pas :
6.10-4 m
Objectif
Lentilles collées
2
Distance focale
120 mm
Poids de l'ensemble
200 g
1
/
4
100%