les filtres - E

LES FILTRES
L’objectif du conditionnement du signal est de Traiter les informations généralement issues des capteurs.
Cette fonction permet donc :
Adapter le signal électrique pour lui donner la forme la plus appropriée pour son traitement;
Amplifier le signal;
Filtrer les signaux (suppression du bruit et des fréquences indésirables);
Linéariser les signaux sur une étendue de mesure;
Convertir en signaux numériques les grandeurs électriques analogiques;
Introduction sur le filtrage
L’opération de filtrage permet :
d’éliminer ou d’affaiblir des fréquences indésirables;
d’isoler dans un signal la ou les bandes de fréquences utiles.
Les applications sont très variées :
Systèmes de communications (téléphonie, réseaux, …);
Systèmes d’acquisition et traitement des données;
Alimentation électrique;
familles de filtre :
Filtrage analogique (avec composants linéaires R, L,C, AOP);
Filtrage numérique (avec composant programmable);
Filtrage à capacités commutées (avec condensateur + interrupteur)
Dans la famille des filtres analogiques, on distingue :
Les filtres passifs (Composants discrets R, L et C);
Les filtres actifs (Composants discrets R, L et C + ALI).
La transmittance ou fonction de transfert T(jω) d’un quadripôle Q est défini par :
La transmittance T(jω) représente un nombre complexe, qui possède un module et un argument qui
dépendent de la pulsation ω.
Le module est appelé Amplification noté T(ω) (sans unité) et l’argument φ(ω) est appelé phase (en ° ou rad).
Au lieu de travailler avec l’amplification, on préfère travailler avec le gain exprimé en décibel (dB).
Le gain G s’exprime par :
Le diagramme de Bode est une représentation graphique permettant de tracer les variations du gain G(ω) et
de la phase φ(ω) en fonction de la pulsation ω.
Il est constitué par 2 graphiques.
AGIR
Conditionnement du Signal filtrage
Quadripôle
Q
V
e
V
s
Vs
Tj Ve
20.logG T j

DIAGRAMME DE BODE
L’axe des abscisses est gradué est échelle logarithmique pour rapprocher les hautes fréquences et les très
basses fréquences sur un même graphique.
La bande passante d’un filtre caractérise la bande de fréquence qui n’est pas éliminer en sortie d’un filtre.
Elle est définit par une borne inférieure et une borne supérieure.
Définition de la bande passante à -3dB
La bande passante à -3dB, est la zone de fréquence pour laquelle on a un gain G supérieur ou égal à Gmax-
3dB ou
bien, un module de la transmittance T tels que T > Tmax/√2.
L’objectif du filtrage étant de sélectionner une fréquence ou une bande de fréquence, on distingue donc 4
types de filtre idéal (gabarit) :
Filtre passe bas :
Filtre laissant passer les basses fréquences et élimine les hautes fréquences.
Filtre passe haut :
Filtre laissant passer les hautes fréquences et élimine les basses fréquences.
Filtre passe bande :
Filtre laissant passer une bande de fréquence et élimine celles en dehors ce celle-ci.
Filtre réjecteur de bande (coupe bande) :
Filtre laissant passer toutes les fréquences sauf une bande de fréquence.
Dans la réalité, il est impossible de réaliser des filtres idéaux.
Par conséquent, les gabarits des filtres sont modifiés tels que :
1 décade

FILTRAGE ANALOGIQUE
Tous les filtres du premier ordre, ont une fonction de transfert (transmittance) T(jω) de la forme :
T0 est appelé amplification statique, ω0 la pulsation de coupure.
Avec cette fonction de transfert, il n’est possible de réaliser que des filtres du type passe bas et passe haut, en
fonction du coefficient a.
Fonction de transfert d’un filtre passe bas :
Fonction de transfert du type passe haut :
ETUDE D’UN FILTRE PASSIF PASSE BAS DU 1er ORDRE
Considérons le montage ci-contre.
On applique le diviseur de tension, car le courant de sortie est supposé nul.
Donc :
En comparaison avec la forme générale d’un filtre du premier ordre du type passe bas, on obtient :
Calcul de G(ω)
Calcul de φ(ω) :
La bande passante est définit par la zone de fréquence telle que G(ω)=Gmax-3dB, donc pour :
Donc, il faut résoudre :
Cette équation est vérifiée uniquement pour :
Soit, donc pour :
La bande passante BP est donc : BP = [0 ω0].
Parfois, il n’est pas nécessaire de tracer précisément le diagramme de Bode. On ne tracera donc que le
diagramme de Bode asymptotique.
On décompose l’ensemble des fréquences (ou pulsations) en 3 zones :
- fréquence f << f0 ;
- fréquence f >> f0;
- fréquence f = f0.
Etude pour f << f0 :
La transmittance T(jω) peut se simplifier par :
Donc :
Etude pour f >> f0 :
0
0
0
1.
.1
aj
Vs
T j T
Ve j
0
0
1
.1
Vs
T j T
Ve j
0
0
0
.1
j
Vs
T j T
Ve j
20.log 20.log 1 0
0
arctan arctan 0 0
1
BF
G T j

La transmittance T(jω) peut se simplifier par :
Donc :
Dans le diagramme de Bode, l’axe X des abscisses est gradué en X=log(ω), donc le gain en hautes
fréquences, est une droite du type -20X+log(ω0)
Etude pour f = f0 :
La transmittance T(jω) peut se simplifier par :
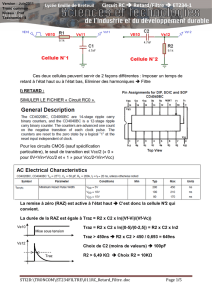
LES FILTRES ACTIFS
GENERALITES
Les filtres actifs sont composés d’éléments discrets, tels que les résistances, les condensateurs et les
inductances, mais aussi d’un ou plusieurs ALI (AOP).
Pour simplifier les études, on considèrera toujours que ces ALI sont idéaux et qu’ils fonctionnent en régime
linéaire.
Rappel sur les ALI :
ALI = Amplificateur Linéaire Intégré. Appelé aussi AOP
Norme française Norme américaine
On omet généralement de placer les bornes d’alimentation.
Tension différentielle :
L’ALI se comporte comme un amplificateur
A vd = amplification en mode différentiel (ex : 105)
A vc = amplification en mode commun (environ 1)
Donc :
+
-
-
S
+
-
S
VV
..
2
s vd vc VV
V A V V A
..
s vd vd
V A V V A

La tension de sortie est limitée en théorie à l’intervalle [+Vcc;-Vcc]. En
réalité, à [+Vsat;-Vsat].
+Vcc - Vsat est appelée tension de déchet (de l’ordre de 1 à 2 V) sauf pour
les ALI dit « rail to rail » (qqs millivolts).
Cette tension est très faible. Un ALI n’est donc jamais utilisé en boucle ouverte pour amplifier un signal.
Nécessité d’une boucle de réaction
On peut donc modéliser le fonctionnement du montage ci-dessus par :
La loi d’entrée/sortie est donnée par la relation de Black :
Donc
Or A vd est très grand, donc :
Étude de la stabilité :
Il y a donc compensation. Un point d’équilibre est possible. On dit que le montage est stable.
Le montage est dit en fonctionnement linéaire.
- Impédance d’entrée différentielle infinie Ze : → i + = i - = 0
- Impédance de sortie nulle Zs : → Vs indépendant du courant de sortie
- Amplification différentielle Avd infinie : → En régime linéaire ε = 0 → V+ = V-
On a donc pour chaque ALI :
ETUDE DES FILTRES DU 1er ORDRE
Les structures générales des filtres actifs du premier ordre sont données ci-dessous. Elles diffèrent selon le
type de montage de l’ALI (montage inverseur, non inverseur ou suiveur).
5
15 150
10
vd
Vcc V
A
.
vd
VV
Vs A
1
10
..
V Ve
R
V Vs kVs
RR
12 2
11
1
RR R
Vs
Ve R R
+
Avd
k
V
e
ε
V-
Vs
0
0
vd
VV
ii
A
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%